BOSM -4Z2000 ម៉ាស៊ីនខួងនិងកិន CNC ល្បឿនលឿន
1. ការប្រើប្រាស់ឧបករណ៍៖
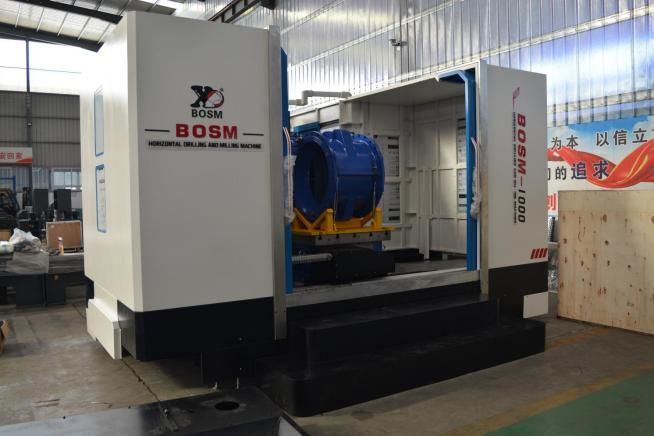
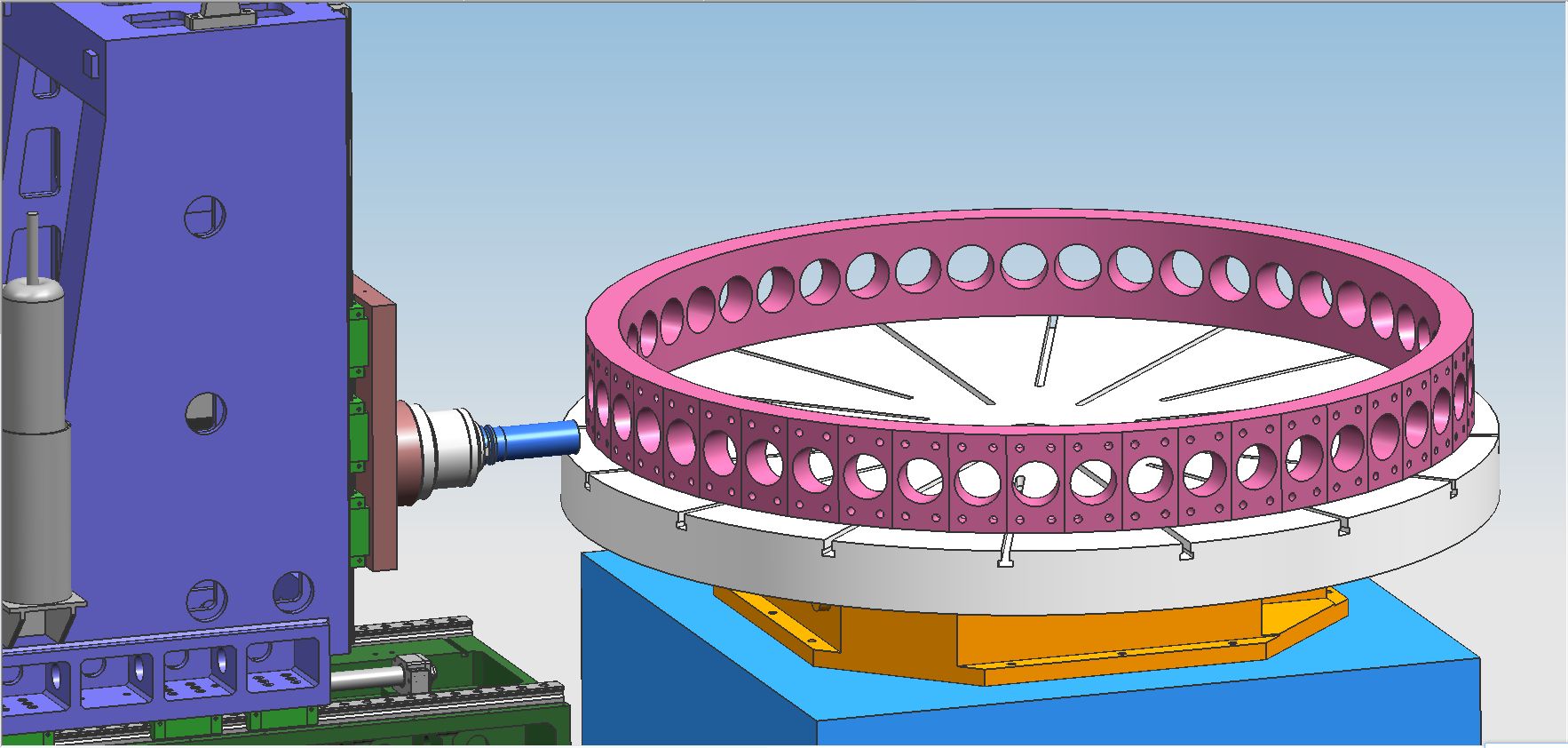
ម៉ាស៊ីនខួង CNC ផ្ដេក BOSM-1000 ត្រូវបានប្រើជាចម្បងសម្រាប់ការខួង កិន កិន ប៉ះ និងដំណើរការគួរឱ្យធុញនៃសន្ទះបិទបើក សន្ទះបិទបើក ឧបករណ៍កាត់បន្ថយ ព្រុយ ឌីស ចិញ្ចៀន ការគាំទ្រ slewing និង workpieces ផ្សេងទៀតនៅក្នុងជួរដ៏មានប្រសិទ្ធិភាពនៃកម្រាស់។ .ការខួង ការកិន ការគៀប និងការធុញអាចដឹងបាននៅលើផ្នែកសម្ភារៈតែមួយ និងសម្ភារៈផ្សំ។ដំណើរការម៉ាស៊ីនរបស់ម៉ាស៊ីនត្រូវបានគ្រប់គ្រងដោយឌីជីថល ហើយប្រតិបត្តិការគឺងាយស្រួលណាស់។វាអាចដឹងពីស្វ័យប្រវត្តិកម្ម ភាពជាក់លាក់ខ្ពស់ ពហុពូជ និងផលិតកម្មដ៏ធំ។
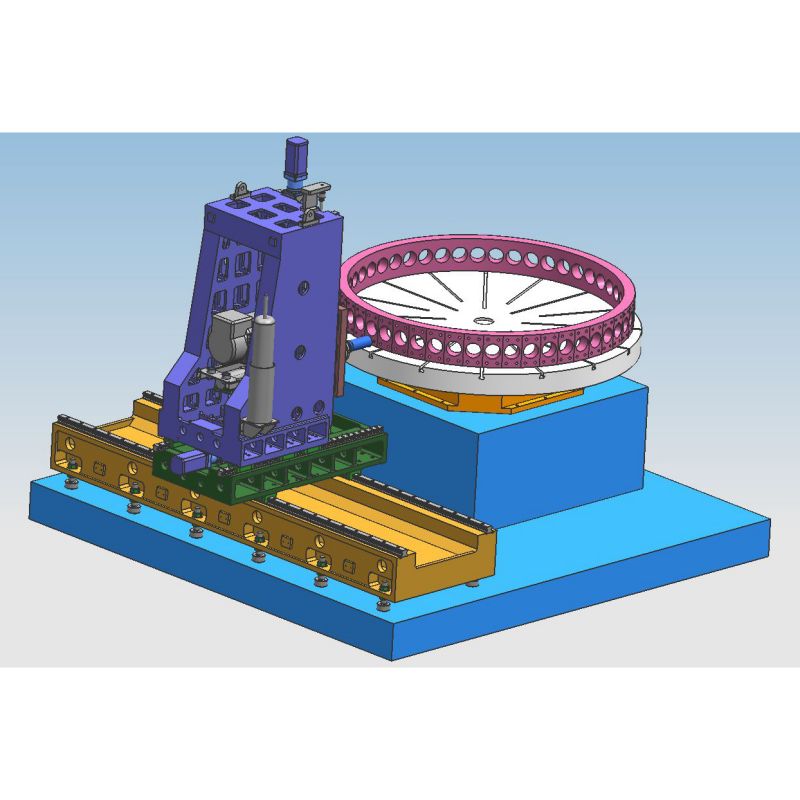
2. រចនាសម្ព័ន្ធឧបករណ៍៖
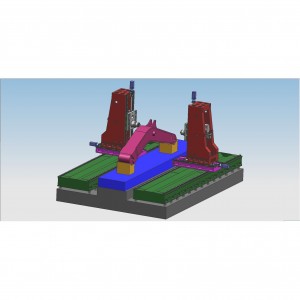
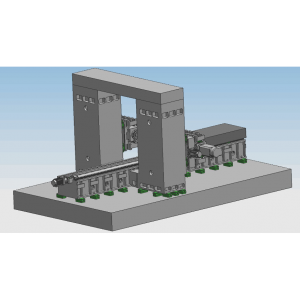
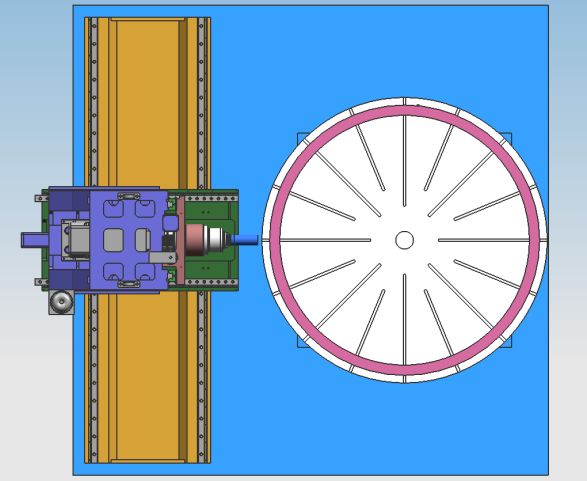
ឧបករណ៍នេះត្រូវបានផ្សំឡើងជាចម្បងនៃគ្រែ, CNC តារាង rotary សន្ទស្សន៍, ជួរឈរចល័ត, កែបចល័ត, ខួងនិងម៉ាស៊ីនកិន, ឧបករណ៍រំអិលដោយស្វ័យប្រវត្តិនិងឧបករណ៍ការពារ, ឧបករណ៍ត្រជាក់ចរាចរ, ប្រព័ន្ធគ្រប់គ្រងឌីជីថល, ប្រព័ន្ធធារាសាស្ត្រ, ប្រព័ន្ធអគ្គិសនីនិងដូច្នេះនៅលើ។ផ្លូវដែកមគ្គុទ្ទេសក៍លីនេអ៊ែររមូរត្រូវបានគាំទ្រនិងដឹកនាំហើយវីសដែលមានភាពជាក់លាក់ត្រូវបានជំរុញ។ម៉ាស៊ីនមានភាពត្រឹមត្រូវនៃទីតាំងខ្ពស់ និងភាពត្រឹមត្រូវនៃទីតាំងម្តងទៀត។
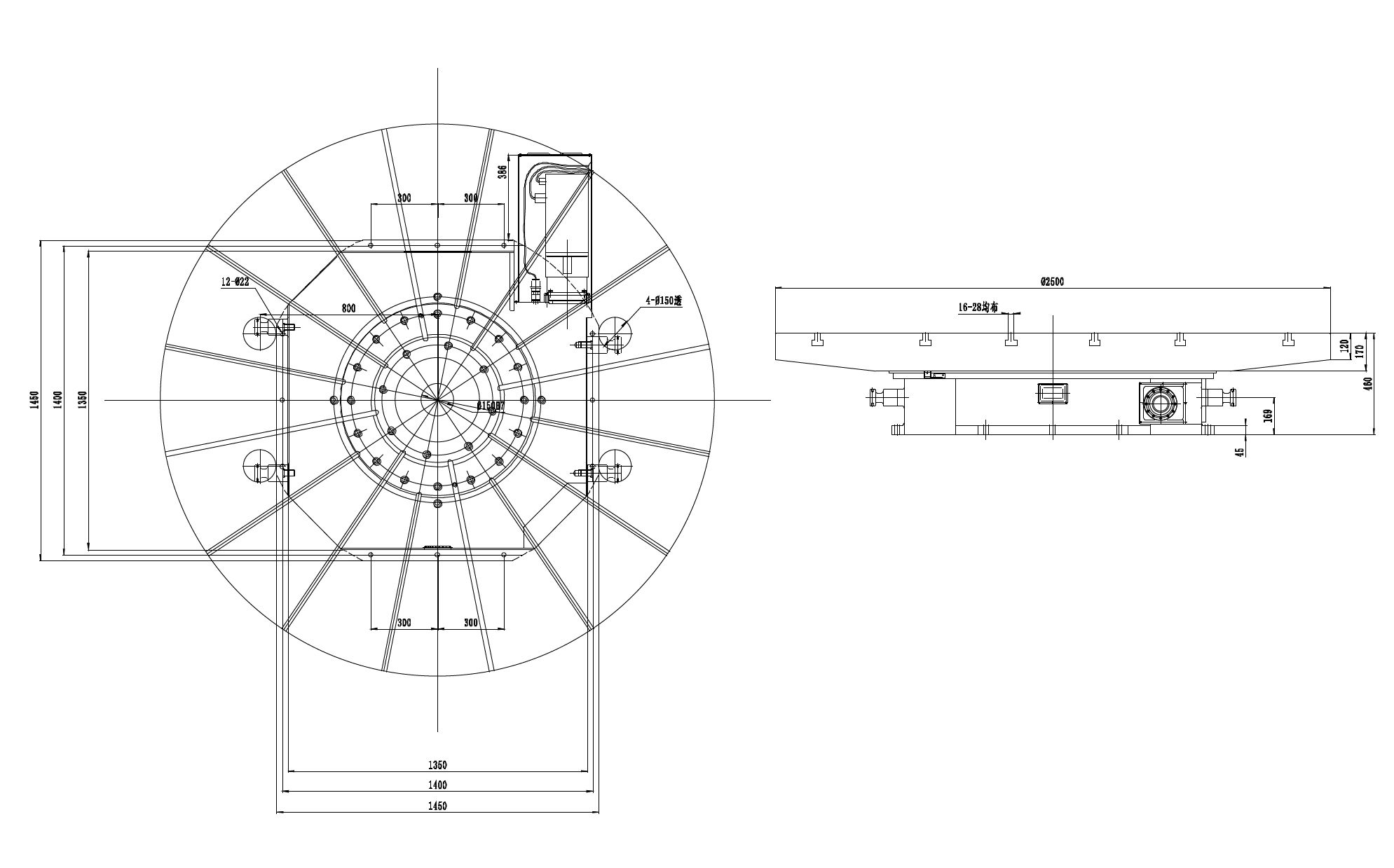
២.១.តុធ្វើការលើគ្រែ៖ គ្រែត្រូវបានធ្វើពីផ្នែករចនាសម្ព័ន្ធដែកវណ្ណះ HT250។វាត្រូវបានបញ្ចប់បន្ទាប់ពីការ tempering ទីពីរដើម្បីដកភាពតានតឹងខាងក្នុង។វាមានភាពរឹងមាំថាមវន្ត និងឋិតិវន្តល្អ និងមិនខូចទ្រង់ទ្រាយ។ចានដាក់លិបិក្រមគ្រប់គ្រងលេខភាពជាក់លាក់, servo drive 360° ការដាក់លិបិក្រមបំពាន 360° និងការចាក់សោរខ្យល់/ធារាសាស្ត្រ ប្រព័ន្ធដ្រាយប្រើម៉ូទ័រ AC servo ដើម្បីធ្វើលិបិក្រមផ្នែកបង្វិលដោយស្វ័យប្រវត្តិ 360° ហើយភាពត្រឹមត្រូវនៃការធ្វើលិបិក្រមគឺមួយពាន់ដឺក្រេ។ចានដាក់លិបិក្រមត្រូវបានដាក់នៅលើកំពូលនៃគ្រែ ហើយប៊ូឡុងដែលអាចលៃតម្រូវបានត្រូវបានចែកចាយនៅខាងក្រោមគ្រែ ដែលអាចលៃតម្រូវកម្រិតនៃតុធ្វើការលើគ្រែបានយ៉ាងងាយស្រួល។
២.២.ជួរឈរដែលអាចចល័តបាន: ជួរឈររចនាសម្ព័ន្ធដែកដែលអាចចល័តបានត្រូវបានបញ្ចប់បន្ទាប់ពីការព្យាបាលកំដៅបន្ទាប់បន្សំដើម្បីដកចេញភាពតានតឹងខាងក្នុង។វាមានភាពរឹងមាំថាមវន្ត និងឋិតិវន្តល្អ និងមិនខូចទ្រង់ទ្រាយ។សំណុំនៃគូវីសគ្រាប់បាល់ដែលមានភាពជាក់លាក់ និងម៉ូទ័រ servo ធ្វើឱ្យស្លាយជួរឈរផ្លាស់ទីក្នុងទិសដៅអ័ក្ស Y ។សំណុំនៃគូវីសគ្រាប់បាល់ដែលមានភាពជាក់លាក់ និងម៉ូទ័រ servo ធ្វើឱ្យស្លាយជួរឈរផ្លាស់ទីក្នុងទិស X-axis ។ដំឡើងឧបករណ៍ខួងនៅលើស្លាយឯកតា។ចលនានៃជួរឈរត្រូវបានដឹងដោយការបង្វិលគ្រាប់បាល់នៅលើវីសគ្រាប់បាល់ដែលជំរុញដោយម៉ូទ័រ servo តាមរយៈ coupling ។
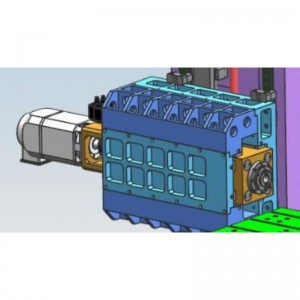
២.៣.កៅអីចល័ត៖ រទេះរុញចល័តត្រូវបានបំពាក់ដោយគូផ្លូវដែកមគ្គុទ្ទេសក៍លីនេអ៊ែររមូរដែលមានសមត្ថភាពផ្ទុកខ្ពស់ខ្លាំងពីរ សំណុំនៃគូវីសគ្រាប់បាល់ដែលមានភាពជាក់លាក់ និងម៉ូទ័រ servo ដែលជំរុញក្បាលថាមពលខួងឱ្យផ្លាស់ទីក្នុងទិសដៅអ័ក្ស Z ដែលអាច ដឹងថាថាមពលក្បាលលឿនទៅមុខ ធ្វើការទៅមុខ បញ្ច្រាសលឿន ឈប់ និងសកម្មភាពផ្សេងទៀត។វាមានមុខងារនៃការបំបែកបន្ទះឈីបដោយស្វ័យប្រវត្តិ ការដកបន្ទះឈីប និងការផ្អាក។
២.៤.ក្បាលថាមពលខួង: ក្បាលថាមពលខួងយក spindle មេកានិចតៃវ៉ាន់ ហើយ spindle ជាក់លាក់ពិសេសទទួលយកទំនាក់ទំនងមុំដែលដឹងពីការផ្លាស់ប្តូរល្បឿន stepless តាមរយៈការបញ្ជូនខ្សែក្រវ៉ាត់ synchronous កម្លាំងខ្ពស់។ជំរុញដោយម៉ូទ័រ servo និងវីសគ្រាប់បាល់។អ័ក្ស Y អាចត្រូវបានតភ្ជាប់ ប្រកាន់យកការត្រួតពិនិត្យពាក់កណ្តាលបិទរង្វិលជុំនិងអាចដឹងថាមុខងារ interpolation លីនេអ៊ែរនិងរាងជារង្វង់។ចុង spindle គឺជារន្ធ taper BT50 ។
២.៥.ឧបករណ៍រំអិលដោយស្វ័យប្រវត្តិ និងឧបករណ៍ការពារ៖
ម៉ាស៊ីននេះត្រូវបានបំពាក់ដោយឧបករណ៍ប្រេងរំអិលដោយស្វ័យប្រវត្តិ ដែលអាចរំអិលដោយស្វ័យប្រវត្តិនូវគូដែលផ្លាស់ទីដូចជា ផ្លូវរថភ្លើង វីសនាំមុខ និងរ៉ាកែត។ម៉ាស៊ីន
អ័ក្ស Z និង អ័ក្ស Y ត្រូវបានបំពាក់ដោយគម្របការពារធូលី ហើយបន្ទះការពារមិនជ្រាបទឹកត្រូវបានដំឡើងនៅជុំវិញតុធ្វើការ។
២.៦.ប្រព័ន្ធគ្រប់គ្រងលេខឌីជីថលពេញលេញ៖
២.៦.១.ជាមួយនឹងមុខងារបំបែកបន្ទះឈីប ពេលវេលាបំបែកបន្ទះឈីប និងវដ្តនៃការបំបែកបន្ទះឈីបអាចត្រូវបានកំណត់នៅលើចំណុចប្រទាក់ man-machine ។
២.៦.២.បំពាក់ដោយមុខងារលើកឧបករណ៍ ឧបករណ៍លើកកម្ពស់អាចត្រូវបានកំណត់នៅលើចំណុចប្រទាក់ man-machine ។នៅពេលដែលការខួងឈានដល់កម្ពស់នេះ ដុំខួងត្រូវបានលើកយ៉ាងលឿនទៅកំពូលនៃស្នាដៃ បន្ទាប់មកបន្ទះសៀគ្វីត្រូវបានបោះចោល ហើយបន្ទាប់មកបញ្ជូនបន្តយ៉ាងលឿនទៅកាន់ផ្ទៃខួង ហើយប្តូរទៅដំណើរការដោយស្វ័យប្រវត្តិ។
២.៦.៣.ប្រអប់បញ្ជាប្រតិបត្តិការកណ្តាល និងឧបករណ៍កាន់ដៃអនុម័តប្រព័ន្ធបញ្ជាជាលេខ ហើយត្រូវបានបំពាក់ដោយចំណុចប្រទាក់ USB និងអេក្រង់ LCD គ្រីស្តាល់រាវ។ដើម្បីជួយសម្រួលដល់ការសរសេរកម្មវិធី ការផ្ទុក ការបង្ហាញ និងការប្រាស្រ័យទាក់ទង ចំណុចប្រទាក់ប្រតិបត្តិការមានមុខងារដូចជា ការសន្ទនារវាងម៉ាស៊ីន និងម៉ាស៊ីន សំណងកំហុស និងការជូនដំណឹងដោយស្វ័យប្រវត្តិ។
២.៦.៤.គ្រឿងបរិក្ខារមានមុខងារពិនិត្យ និងត្រួតពិនិត្យឡើងវិញនូវទីតាំងរន្ធមុនពេលដំណើរការ ហើយប្រតិបត្តិការគឺងាយស្រួលណាស់។
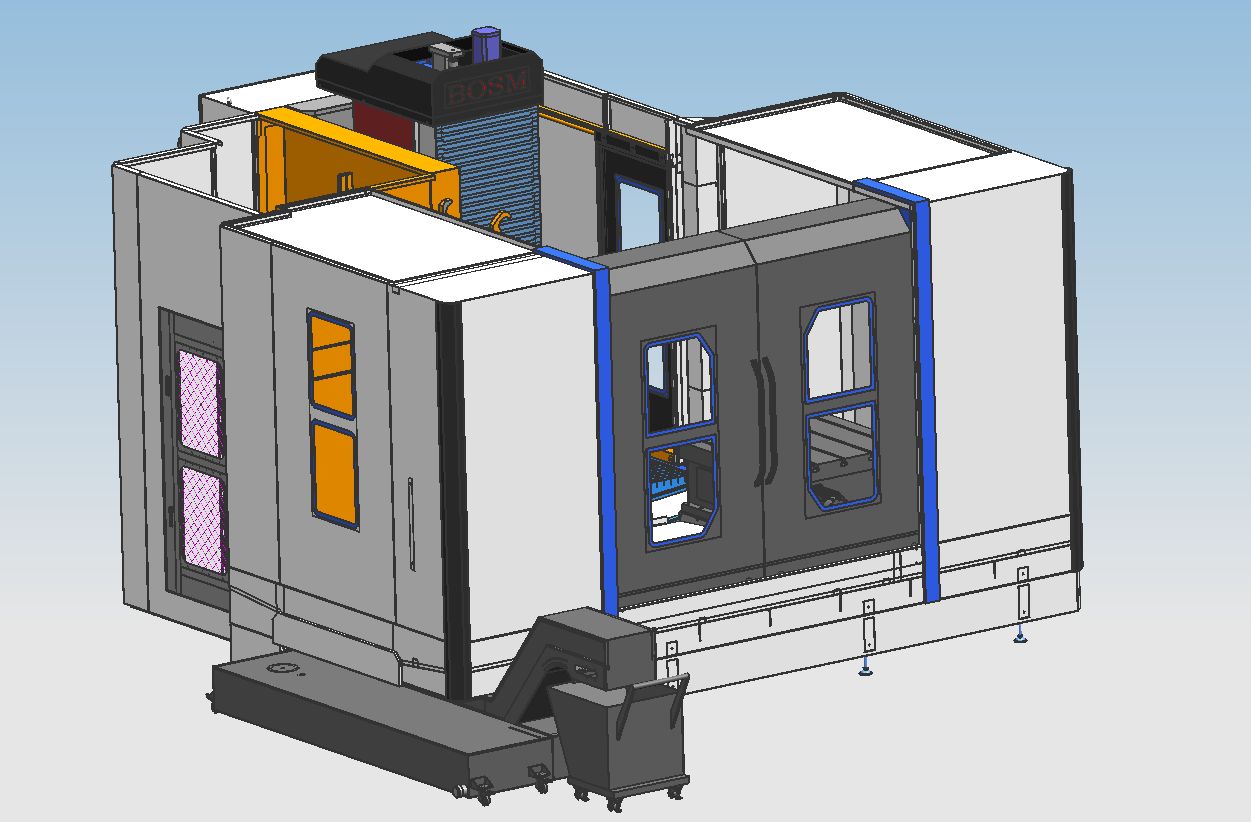
* ដើម្បីធានាបាននូវភាពងាយស្រួលនៃការលើក និងការផ្តល់ចំណីដល់ចិញ្ចៀនធំ ម៉ាស៊ីនមិនមានការការពារពីខាងក្រៅទេ ហើយការការពារពីខាងក្រៅគឺស្រេចចិត្ត។
3. ម៉ាស៊ីនបរិស្ថានប្រើប្រាស់៖
ការផ្គត់ផ្គង់ថាមពល: AC380V ± 10%, 50Hz ± 1 ដំណាក់កាល 1 សីតុណ្ហភាពបរិយាកាស: 0 ° ~ 45 °
4.ប៉ារ៉ាម៉ែត្របច្ចេកទេស
| គំរូ | BOSM-1000 | |
| ដំណើរការអតិបរមា ទំហំស្នាដៃ | អង្កត់ផ្ចិតបង្វិលអតិបរមាដែលអាចអនុញ្ញាតបាននៃ workpiece (mm) | ≤Φ2000 |
|
តុធ្វើការ | វិមាត្រនៃតារាងការងារ (មម) ការ៉េ | □១០០០ |
| វិមាត្រនៃតុធ្វើការ (មម) ជុំ | Φ1200 | |
| បន្ទុកអតិបរមាផ្ដេក (គីឡូក្រាម) | ៥០០០ | |
|
អង្គភាពខួង Ram បញ្ឈរ | ចំនួន) | 1 |
| Spindle taper | BT50 | |
| អង្កត់ផ្ចិតខួង (មម) | ២-១២០ | |
| អង្កត់ផ្ចិតឌីសកាត់ (មម) | ២០០ | |
| អង្កត់ផ្ចិតការប៉ះ (ម. | M6-M36 | |
| ចម្ងាយពីមុខចុង spindle ទៅកណ្តាលតារាង (មម) | 1000-1600 | |
| ចម្ងាយពីកណ្តាល spindle ទៅប្លង់ខាងលើនៃតារាង (mm) | 100-1100 | |
| ល្បឿន spindle (r/min) | 30-3000 | |
| ថាមពលម៉ូទ័រ spindle (kw) | 30 | |
| ស្នាដៃ អ័ក្សបង្វិល (អ័ក្ស A) | លេខបែងចែកអតិបរមា (មម) | 360° |
| កំណត់អង្គភាពបែងចែកអប្បបរមា | 0.001° | |
| ថាមពលម៉ូទ័រ servo អ័ក្ស A (kw) | ៤.២ | |
| ក្បាលថាមពលផ្លាស់ទីទៅឆ្វេង និងស្តាំ (អ័ក្ស X) | ការដាច់សរសៃឈាមខួរក្បាលអតិបរមា (មម) | 2000 |
| ល្បឿនផ្លាស់ទីអ័ក្ស X (m/min) | ០~៨ | |
| ថាមពលម៉ូទ័រ servo អ័ក្ស X (kw) | ២.៤ | |
| ក្បាលថាមពលផ្លាស់ទីឡើងលើចុះក្រោម (អ័ក្ស Y) | ការដាច់សរសៃឈាមខួរក្បាលអតិបរមា (មម) | ១០០០ |
| ល្បឿនផ្លាស់ទីអ័ក្ស Y (m/min) | ០~៨ | |
| ថាមពលម៉ូទ័រ servo អ័ក្ស Y (kw) | 2.4 ហ្វ្រាំង | |
| ចលនាបណ្តោយជួរឈរ (អ័ក្ស Z) | ការដាច់សរសៃឈាមខួរក្បាលអតិបរមា (មម) | ៦០០ |
| ល្បឿនផ្លាស់ទីអ័ក្ស Z (m/min) | ០~៤ | |
| ថាមពលម៉ូទ័រ servo អ័ក្ស Z (kw) | ២.៤ | |
| ភាពត្រឹមត្រូវនៃទីតាំង | 1000 ម។ | ± 0.05 |
| ភាពអាចធ្វើម្តងទៀត | 1000 ម។ | ± 0.025 |
| ភាពត្រឹមត្រូវនៃតារាងសន្ទស្សន៍ CNC (មម) |
| 15” |
| វិមាត្រម៉ាស៊ីន (រួមទាំងការការពារ) | ប្រវែង (X) × ទទឹង (Z) × កម្ពស់ (Y) (មម) | 5300*6000*3400 |
| ទំងន់សរុប (t) រួមទាំងការការពារ | (ប្រហែល) ២០ | |