ម៉ាស៊ីនកិន BOSM -4014 ប្រឆាំងក្បាល
1. ការប្រើប្រាស់ម៉ាស៊ីន:
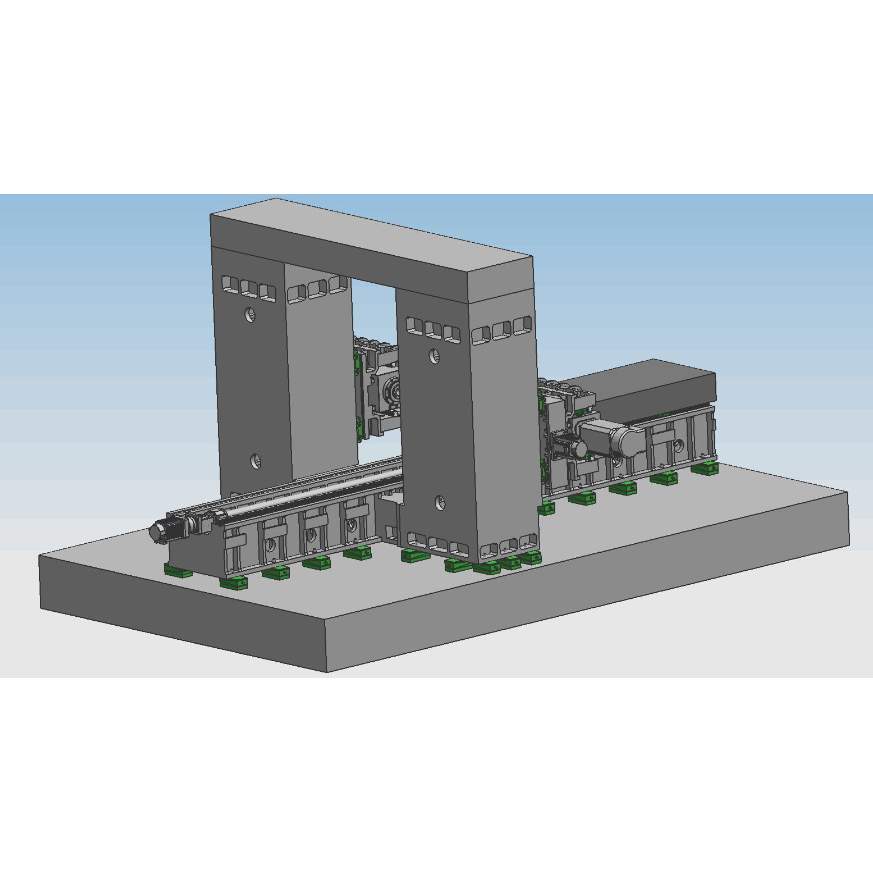
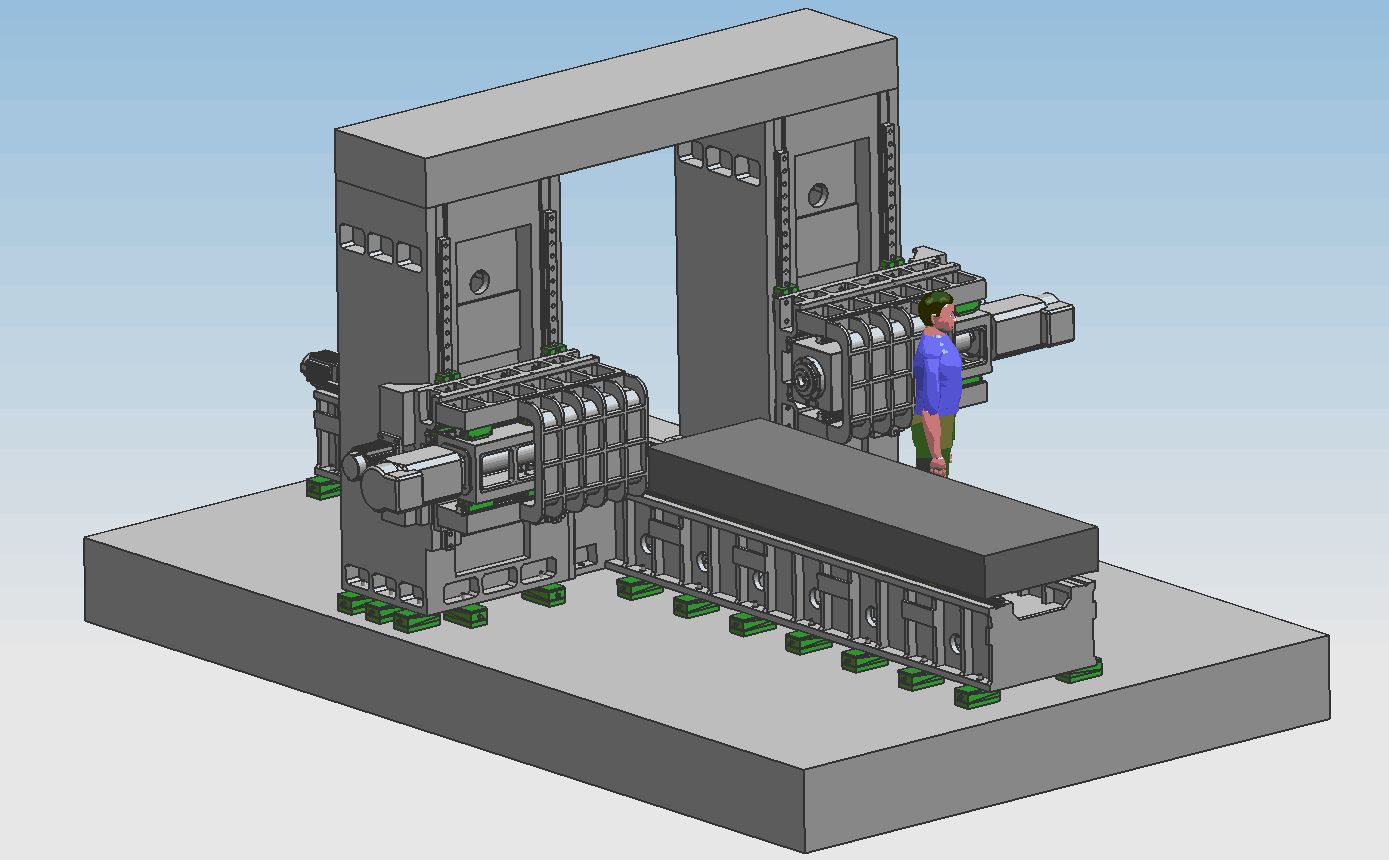
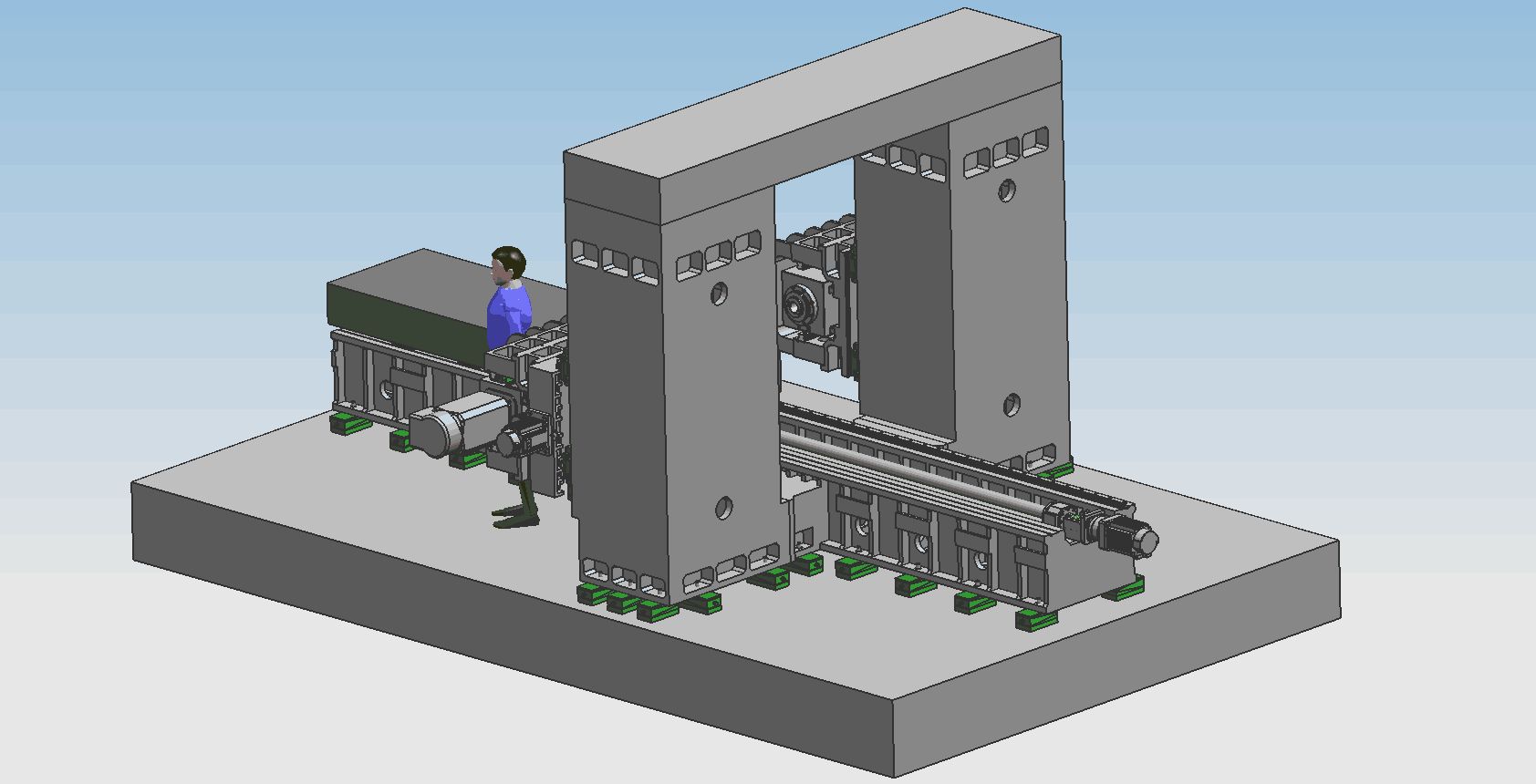
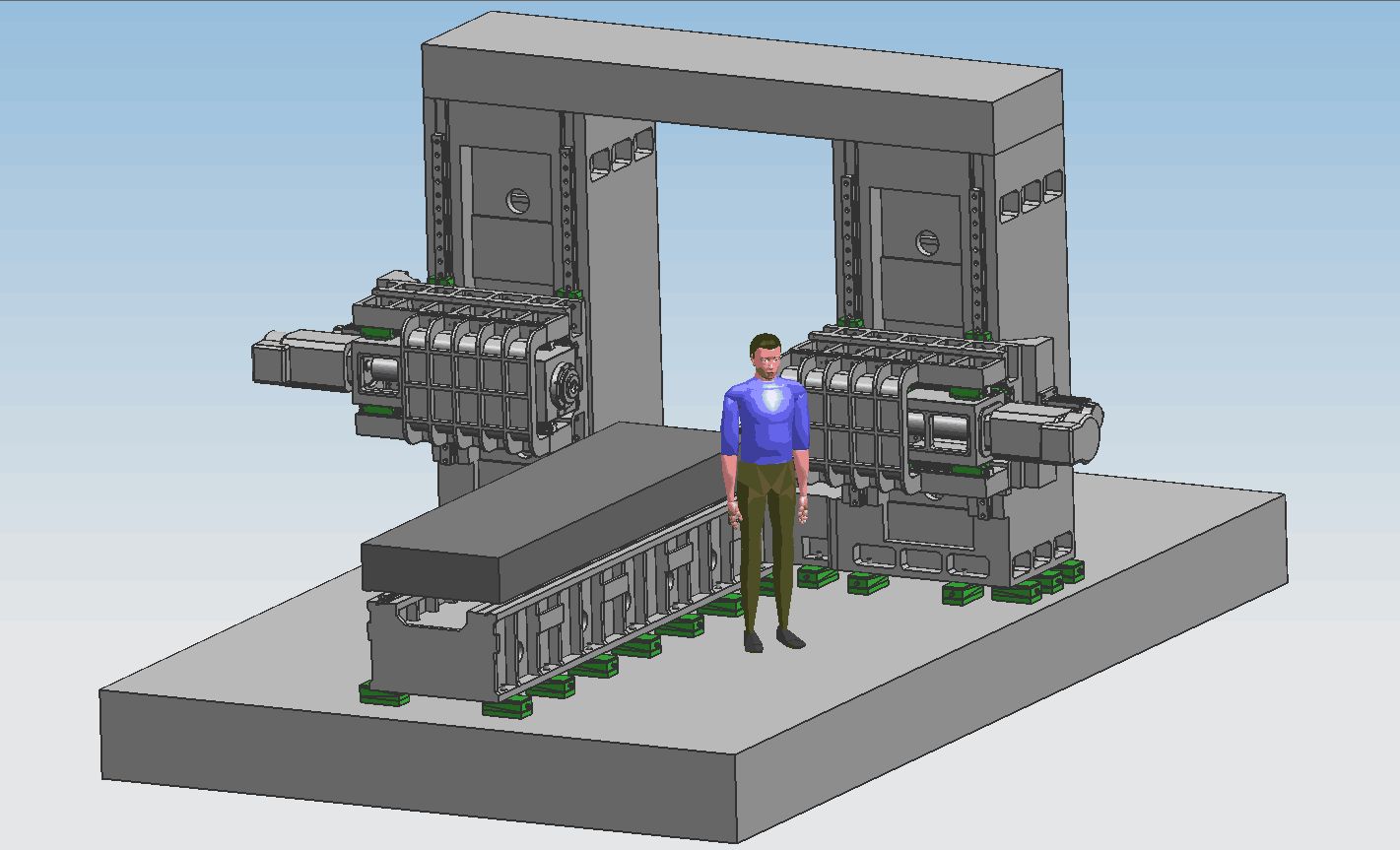
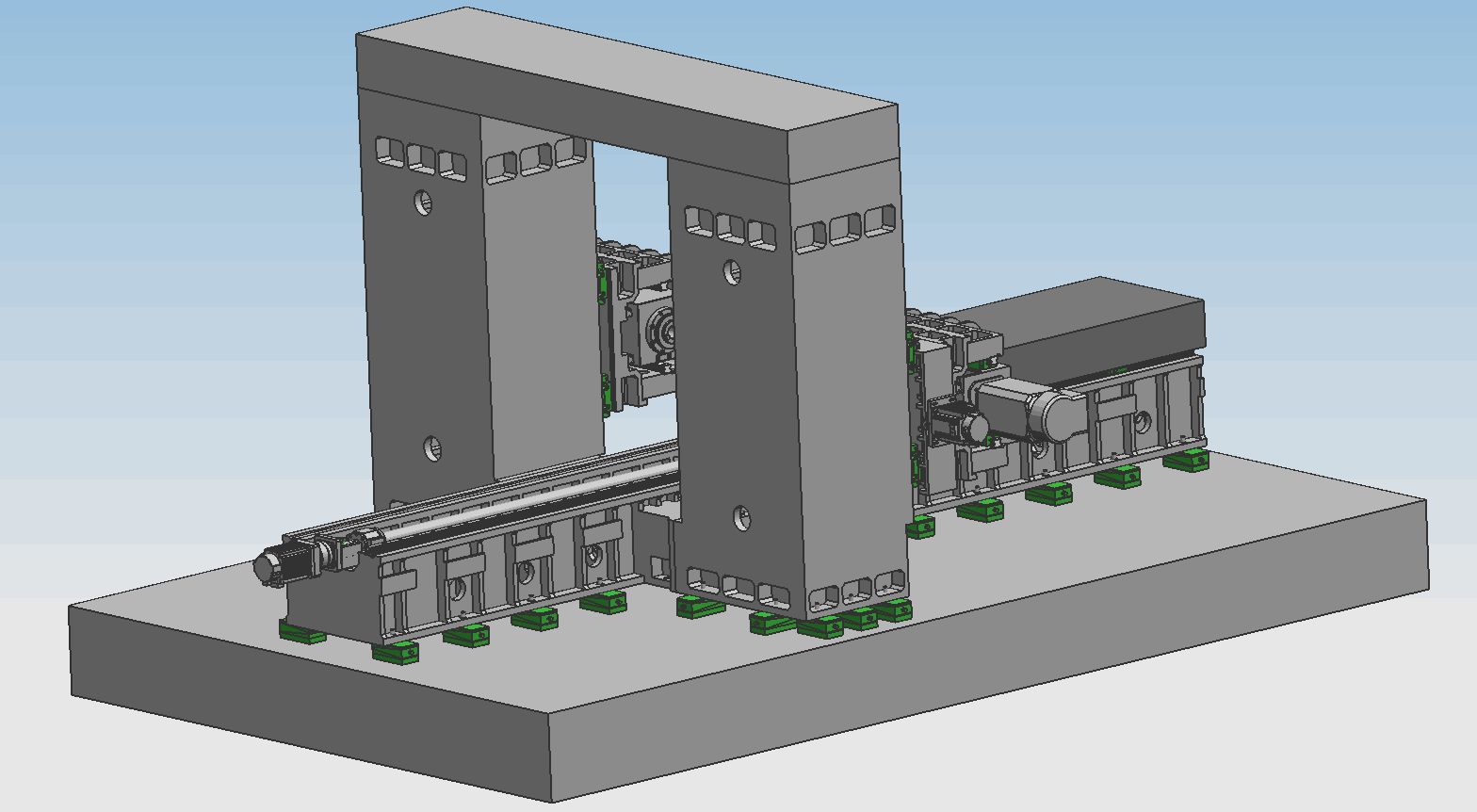
BOSM- 6000* 1000 fixed-beam CNC gantry double-column head-to-head boring and milling machine is a special machine machinery for process excavator arms/sticks. ខ្នើយអាចដឹងពីដំណើរការយ៉ាងឆាប់រហ័សនៃ workpiece នេះ workpiece អាចត្រូវបានខួង, កិន, និងអផ្សុកនៅក្នុងជួរជំងឺដាច់សរសៃឈាមខួរក្បាលដែលមានប្រសិទ្ធិភាព workpiece អាចត្រូវបានដំណើរការនៅនឹងកន្លែងក្នុងពេលតែមួយ (មិនត្រូវការការតោងបន្ទាប់បន្សំ) ល្បឿនផ្ទុកនិង unloading ។ គឺលឿន ល្បឿនកំណត់ទីតាំងលឿន ហើយភាពត្រឹមត្រូវនៃដំណើរការគឺខ្ពស់។ ខ្ពស់ប្រសិទ្ធភាពដំណើរការខ្ពស់។
២.ម៉ាស៊ីន រចនាសម្ព័ន្ធលក្ខណៈ:
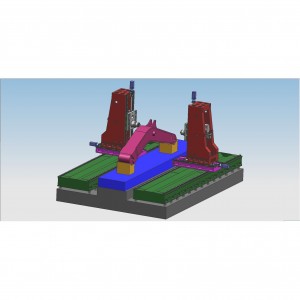
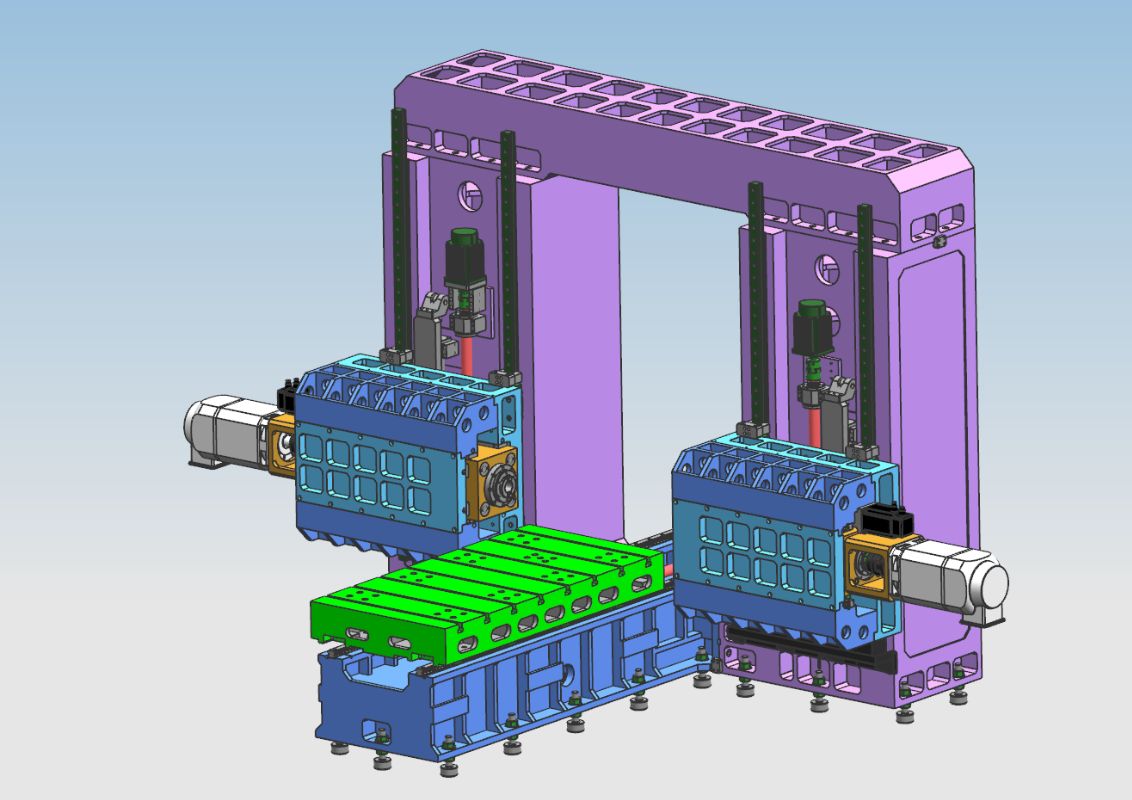
ធាតុផ្សំសំខាន់ៗរបស់ឧបករណ៍ម៉ាស៊ីន៖ គ្រែ កៅអីអង្គុយ ជួរឈរឆ្វេង និងស្តាំ ធ្នឹម ធ្នឹមតភ្ជាប់ ធ្នឹម ទ្រនាប់ កំរាលព្រំ។ រណ្តៅខ្សាច់ → រំញ័រ ភាពចាស់ → ការព្យាបាលកំដៅ កំដៅចង្ក្រាន → រំញ័រ ភាពចាស់ → ម៉ាស៊ីនរដុប → រំញ័រ ភាពចាស់ → ចង្ក្រានក្តៅ annealing → vibration aging → បញ្ចប់ លុបបំបាត់ទាំងស្រុងនូវភាពតានតឹងអវិជ្ជមាននៃផ្នែក និងរក្សាដំណើរការនៃផ្នែកមានស្ថេរភាព។ គ្រែថេរ ជួរឈរខាងឆ្វេង និងខាងស្តាំ កន្លែងដាក់ឥវ៉ាន់ និងកៅអីធ្វើការផ្លាស់ទី ; វាមានមុខងារនៃការកិន, ធុញ, ខួង, countersinking, tapping, ល. វិធីសាស្រ្ត cooling tool គឺការ cooling ខាងក្រៅ។ ឧបករណ៍ម៉ាស៊ីនមានអ័ក្សចំណីចំនួន 5 ដែលអាចដឹងពីតំណភ្ជាប់ 4-axis និង 5-axis single-action។ មានក្បាលថាមពល 2 ។ អ័ក្សនៃឧបករណ៍ themachine និងក្បាលថាមពលត្រូវបានបង្ហាញក្នុងរូបភាពខាងក្រោម។X
២.១.រចនាសម្ព័ន្ធសំខាន់នៃផ្នែកចំណីបញ្ជូនតាមអ័ក្ស
២.១.១.អ័ក្ស X៖តុធ្វើការច្រាសមកវិញតាមបណ្ដោយផ្លូវដែកនៃគ្រែថេរ។
X 1- អ័ក្សដ្រាយ: ម៉ូទ័រ AC servo បូកនឹងឧបករណ៍កាត់បន្ថយភពដែលមានភាពជាក់លាក់ខ្ពស់ត្រូវបានជំរុញដោយវីសគ្រាប់បាល់ដើម្បីជំរុញចលនានៃកៅអីធ្វើការដើម្បីដឹងពីចលនាលីនេអ៊ែរនៃអ័ក្ស X
ទម្រង់ផ្លូវដែកមគ្គុទ្ទេសក៍៖ ដាក់ផ្លូវដែកមគ្គុទ្ទេសក៍លីនេអ៊ែរដែលមានភាពជាក់លាក់ខ្លាំងពីរ។
2.1.2 អ័ក្ស Z1៖ក្បាលថាមពល និងអាបត្រូវបានដំឡើងបញ្ឈរនៅផ្នែកខាងមុខនៃជួរឈរ ហើយភ្ជាប់ឡើងលើ និងចុះក្រោមតាមបណ្តោយផ្លូវដែកណែនាំជួរឈរ។
ការបញ្ជូនតាមអ័ក្ស Z1៖ ម៉ូទ័រ AC servo និងកង់ធ្វើសមកាលកម្មត្រូវបានប្រើដើម្បីជំរុញវីសបាល់ដើម្បីជំរុញអាបឱ្យដឹងពីចលនាលីនេអ៊ែរអ័ក្ស Z
2.1.3 អ័ក្ស Z2៖ក្បាលថាមពល និងអាបត្រូវបានដំឡើងបញ្ឈរនៅផ្នែកខាងមុខនៃជួរឈរ ហើយភ្ជាប់ឡើងលើ និងចុះក្រោមតាមបណ្តោយផ្លូវដែកណែនាំជួរឈរ។
ការបញ្ជូនតាមអ័ក្ស Z2៖ ម៉ូទ័រ AC servo និងកង់ធ្វើសមកាលកម្មត្រូវបានប្រើដើម្បីជំរុញវីសបាល់ដើម្បីជំរុញអាបឱ្យដឹងពីចលនាលីនេអ៊ែរអ័ក្ស Z ។
2.1.4 អ័ក្ស Y1៖សាប់ក្បាលថាមពលត្រូវបានតំឡើងបញ្ឈរនៅផ្នែកខាងមុខនៃជួរឈរខាងស្តាំ ហើយច្រាសមកវិញទាំងឆ្វេង និងស្តាំតាមផ្លូវដែកណែនាំជួរឈរ។
ការបញ្ជូនតាមអ័ក្ស Y1៖ ម៉ូទ័រ AC servo បូកនឹងឧបករណ៍កាត់បន្ថយភពដែលមានភាពជាក់លាក់ខ្ពស់ត្រូវបានប្រើដើម្បីជំរុញ ram ដើម្បីផ្លាស់ទីតាមវីសគ្រាប់បាល់ ដើម្បីដឹងពីចលនាលីនេអ៊ែរនៃអ័ក្ស Y1
2.1.5 អ័ក្ស Y2៖សាប់ក្បាលថាមពលត្រូវបានដំឡើងបញ្ឈរនៅផ្នែកខាងមុខនៃជួរឈរខាងស្តាំ ហើយច្រាសមកវិញទៅឆ្វេង និងស្តាំតាមផ្លូវដែកណែនាំជួរឈរ។
ការបញ្ជូនតាមអ័ក្ស Y2៖ ម៉ូទ័រ AC servo បូកនឹងឧបករណ៍កាត់បន្ថយភពដែលមានភាពជាក់លាក់ខ្ពស់ត្រូវបានប្រើដើម្បីជំរុញ ram ដើម្បីផ្លាស់ទីតាមវីសបាល់ដើម្បីដឹងពីចលនាលីនេអ៊ែរអ័ក្ស Y2 ។
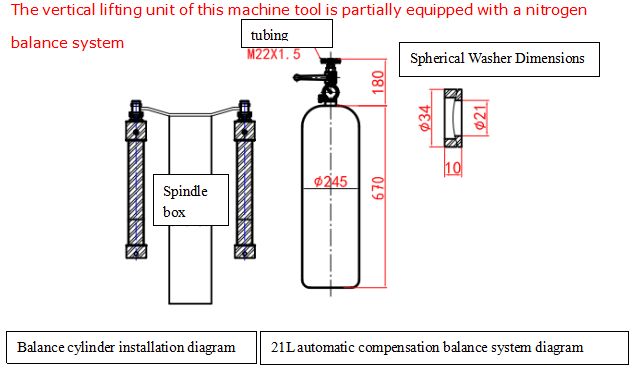
២.២.ទិសដៅផ្លាស់ប្តូរនៃក្បាលម៉ាស៊ីនខួង និងម៉ាស៊ីនកិន (រួមទាំងក្បាលថាមពល 1 និង 2) ទទួលយករចនាសម្ព័ន្ធ ram ការ៉េ ដែលជាវិធីសាស្ត្រណែនាំផ្លូវដែករួមបញ្ចូលគ្នាដ៏ទំនើបបំផុត ផ្លូវដែករឹងត្រូវបានហ៊ុំព័ទ្ធដោយការគាំទ្រដ៏រឹងមាំ ផ្លូវដែក roller លីនេអ៊ែរ 4 គូត្រូវបានណែនាំ ហើយដ្រាយប្រើម៉ូទ័រ AC servo ជំរុញខ្សែក្រវាត់ធ្វើសមកាលកម្ម (i=2) និងការបញ្ជូនវីសបាល់ដោយភាពជាក់លាក់ ក្បាលថាមពលទទួលយកម៉ូទ័រ servo ដើម្បីបន្ថយល្បឿន តាមរយៈខ្សែក្រវាត់សមកាលកម្ម និងកង់ធ្វើសមកាលកម្ម ដឹកនាំដោយគូផ្លូវដែកមគ្គុទ្ទេសក៍ភាពជាក់លាក់ដែលមានកាតព្វកិច្ចធ្ងន់ និងជំរុញវីសគ្រាប់បាល់បញ្ឈរឱ្យបង្វិល ដោយដឹងថាក្បាលថាមពលធ្វើចលនាបញ្ឈរឡើងលើ និងចុះក្រោម និងបំពាក់ដោយរបារតុល្យភាពអាសូត ដើម្បីកាត់បន្ថយសមត្ថភាពផ្ទុក។ នៃក្បាលម៉ាស៊ីននៅលើវីសនិងម៉ូទ័រ servo ។ ម៉ូទ័រអ័ក្ស Z មានមុខងារហ្វ្រាំងដោយស្វ័យប្រវត្តិ។ ក្នុងករណីដាច់ភ្លើង ហ្វ្រាំងស្វ័យប្រវត្តិនឹងទប់ម៉ូទ័រឱ្យតឹង។ ដូច្នេះវាមិនអាចបង្វិលបានទេ។ នៅពេលធ្វើការ, នៅពេលដែលខួងមិនប៉ះ workpiece, វានឹងចិញ្ចឹមយ៉ាងលឿន; នៅពេលដែលឧបករណ៍ខួងប៉ះនឹងកន្លែងធ្វើការ វានឹងប្តូរទៅជាចំណីដែលកំពុងដំណើរការដោយស្វ័យប្រវត្តិ។ នៅពេលដែលឧបករណ៍ខួងជ្រាបចូលទៅក្នុង workpiece វានឹងប្តូរដោយស្វ័យប្រវត្តិទៅជាការបង្វិលយ៉ាងលឿន; នៅពេលដែលចុងបញ្ចប់នៃការខួងចាកចេញពី workpiece និងឈានដល់ទីតាំងដែលបានកំណត់, តុការងារនឹងផ្លាស់ទីទៅទីតាំងរន្ធបន្ទាប់ដើម្បីដឹងចរន្តដោយស្វ័យប្រវត្តិ។ ក្បាលថាមពលទទួលយកការរួមបញ្ចូលគ្នានៃខ្សែ និងផ្លូវដែករឹង ដែលមិនត្រឹមតែធានានូវល្បឿនដំណើរការរបស់ឧបករណ៍ប៉ុណ្ណោះទេ ប៉ុន្តែថែមទាំងជួយពង្រឹងយ៉ាងខ្លាំងនូវភាពរឹងរបស់ឧបករណ៍ផងដែរ។ ហើយវាអាចដឹងពីមុខងារនៃការខួងរន្ធពិការភ្នែក ការកិន ការកិន ការបំបែកបន្ទះឈីប ការដកបន្ទះឈីបដោយស្វ័យប្រវត្តិ។ល។ ដែលធ្វើអោយប្រសើរឡើងនូវផលិតភាពការងារ។
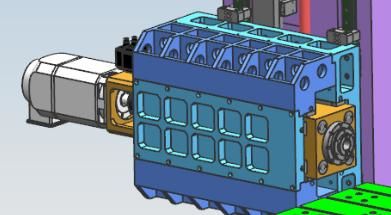
(ក្បាលថាមពលខាងឆ្វេង)
២.៣. ការដកបន្ទះសៀគ្វីនិងត្រជាក់
មានឧបករណ៍បញ្ជូនបន្ទះសៀគ្វី និងខ្សែសង្វាក់រាបស្មើនៅលើភាគីទាំងសងខាងនៅខាងក្រោមកន្លែងធ្វើការ ហើយបន្ទះសៀគ្វីអាចត្រូវបានរំសាយដោយស្វ័យប្រវត្តិទៅកាន់ឧបករណ៍បញ្ជូនបន្ទះឈីបនៅចុងបញ្ចប់តាមរយៈដំណាក់កាលពីរនៃវង់ និងបន្ទះខ្សែសង្វាក់ ដើម្បីសម្រេចបាននូវផលិតកម្មស៊ីវិល័យ។ មានស្នប់ត្រជាក់នៅក្នុងធុង coolant នៃ chip conveyor ដែលអាចត្រូវបានប្រើសម្រាប់ការត្រជាក់ខាងក្រៅនៃឧបករណ៍ ដើម្បីធានាបាននូវដំណើរការខួង និងអាយុកាលសេវាកម្មរបស់ឧបករណ៍ខួង ហើយ coolant អាចត្រូវបានកែច្នៃឡើងវិញ។
3.ប្រព័ន្ធគ្រប់គ្រងលេខឌីជីថលពេញលេញ៖
3.1.ជាមួយនឹងមុខងារបំបែកបន្ទះឈីប ពេលវេលាបំបែកបន្ទះឈីប និងវដ្តនៃការបំបែកបន្ទះឈីបអាចត្រូវបានកំណត់នៅលើចំណុចប្រទាក់ man-machine ។
3.២.ជាមួយនឹងមុខងារលើកឧបករណ៍ ឧបករណ៍លើកកម្ពស់អាចត្រូវបានកំណត់នៅលើចំណុចប្រទាក់ man-machine ។ នៅពេលដែលការខួងឈានដល់កម្ពស់នេះ ដុំខួងត្រូវបានលើកយ៉ាងលឿនទៅផ្នែកខាងលើនៃស្នាដៃ ហើយបន្ទាប់មកបន្ទះសៀគ្វីត្រូវបានបោះចោល ហើយបន្ទាប់មកបានបញ្ជូនបន្តយ៉ាងលឿនទៅកាន់ផ្ទៃខួង ហើយបានបំប្លែងទៅជាការងារដោយស្វ័យប្រវត្តិ។
3.៣.ប្រអប់ត្រួតពិនិត្យប្រតិបត្តិការកណ្តាល និងអង្គភាពឧបករណ៍យួរដៃទទួលយកប្រព័ន្ធគ្រប់គ្រងលេខ ហើយត្រូវបានបំពាក់ជាមួយចំណុចប្រទាក់ USB និងអេក្រង់ LCD គ្រីស្តាល់រាវ។ ដើម្បីជួយសម្រួលដល់ការសរសេរកម្មវិធី ការផ្ទុក ការបង្ហាញ និងការប្រាស្រ័យទាក់ទង ចំណុចប្រទាក់ប្រតិបត្តិការមានមុខងារដូចជា ការសន្ទនារវាងម៉ាស៊ីន និងម៉ាស៊ីន សំណងកំហុស និងការជូនដំណឹងដោយស្វ័យប្រវត្តិ។
3.៤.គ្រឿងបរិក្ខារមានមុខងារមើលជាមុន និងត្រួតពិនិត្យឡើងវិញនូវទីតាំងរន្ធមុននឹងដំណើរការ ហើយប្រតិបត្តិការគឺងាយស្រួលណាស់។
4. ប្រេងរំអិលដោយស្វ័យប្រវត្តិ
ឧបករណ៍ម៉ាស៊ីន គូផ្លូវដែកមគ្គុទ្ទេសក៍លីនេអ៊ែរភាពជាក់លាក់ គូវីសគ្រាប់បាល់ដែលមានភាពជាក់លាក់ និងគូចលនាដែលមានភាពជាក់លាក់ខ្ពស់ផ្សេងទៀតត្រូវបានបំពាក់ដោយប្រព័ន្ធប្រេងរំអិលដោយស្វ័យប្រវត្តិ។ ស្នប់ប្រេងរំអិលដោយស្វ័យប្រវត្តិបញ្ចេញសម្ពាធប្រេង ហើយអង្គជំនុំជម្រះប្រេងរំអិលបរិមាណចូលទៅក្នុងប្រេង។ បន្ទាប់ពីអង្គជំនុំជម្រះប្រេងត្រូវបានបំពេញដោយប្រេងនៅពេលដែលសម្ពាធប្រព័ន្ធកើនឡើងដល់ 1.4-1.75Mpa កុងតាក់សម្ពាធនៅក្នុងប្រព័ន្ធត្រូវបានបិទ ស្នប់ឈប់ ហើយសន្ទះបិទបើកដំណើរការនៅពេលតែមួយ។ នៅពេលដែលសម្ពាធប្រេងនៅក្នុងផ្លូវធ្លាក់ចុះក្រោម 0.2Mpa បរិមាណប្រេងរំអិលចាប់ផ្តើមបំពេញចំណុចរំអិល ហើយបំពេញការបំពេញប្រេងមួយ។ ដោយសារតែការផ្គត់ផ្គង់ប្រេងត្រឹមត្រូវនៃម៉ាស៊ីនចាក់ប្រេងក្នុងបរិមាណ និងការរកឃើញសម្ពាធប្រព័ន្ធ ការផ្គត់ផ្គង់ប្រេងអាចទុកចិត្តបាន ដោយធានាថាមានខ្សែភាពយន្តប្រេងនៅលើផ្ទៃនៃគូ kinematic នីមួយៗ កាត់បន្ថយការកកិត និងការពាក់ និងការពារការខូចខាតដល់ រចនាសម្ព័ន្ធខាងក្នុងដែលបណ្តាលមកពីការឡើងកំដៅ។ ដើម្បីធានាបាននូវភាពត្រឹមត្រូវ និងអាយុកាលរបស់ឧបករណ៍ម៉ាស៊ីន។ បើប្រៀបធៀបជាមួយនឹងគូផ្លូវដែកមគ្គុទ្ទេសក៍រអិល គូផ្លូវដែកមគ្គុទ្ទេសក៍លីនេអ៊ែរវិលដែលប្រើក្នុងឧបករណ៍ម៉ាស៊ីននេះមានគុណសម្បត្តិជាច្រើន៖
① ភាពប្រែប្រួលនៃចលនាគឺខ្ពស់ មេគុណកកិតនៃផ្លូវដែកមគ្គុទ្ទេសក៍វិលគឺតូចត្រឹមតែ 0.0025 ~ 0.01 ហើយថាមពលនៃការបើកបរត្រូវបានកាត់បន្ថយយ៉ាងខ្លាំង ដែលស្មើនឹង 1/10 នៃម៉ាស៊ីនធម្មតាប៉ុណ្ណោះ។
② ភាពខុសគ្នារវាងការកកិតថាមវន្ត និងឋិតិវន្តគឺតូចណាស់ ហើយដំណើរការតាមដានគឺល្អឥតខ្ចោះ ពោលគឺចន្លោះពេលរវាងសញ្ញាបើកបរ និងសកម្មភាពមេកានិកគឺខ្លីបំផុត ដែលអំណោយផលដល់ការកែលម្អល្បឿនឆ្លើយតប និងភាពប្រែប្រួលនៃ ប្រព័ន្ធគ្រប់គ្រងលេខ។
③វាស័ក្តិសមសម្រាប់ចលនាលីនេអ៊ែរដែលមានល្បឿនលឿន ហើយល្បឿនភ្លាមៗរបស់វាគឺខ្ពស់ជាងប្រហែល 10 ដងនៃផ្លូវរអិល។
④ វាអាចដឹងពីចលនាគ្មានចន្លោះ និងធ្វើអោយប្រសើរឡើងនូវភាពរឹងនៃចលនានៃប្រព័ន្ធមេកានិក។
⑤ផលិតដោយអ្នកផលិតដែលមានជំនាញវិជ្ជាជីវៈ វាមានភាពជាក់លាក់ខ្ពស់ ភាពបត់បែនល្អ និងការថែទាំងាយស្រួល។
5. បរិស្ថានប្រើប្រាស់ម៉ាស៊ីន៖
ការផ្គត់ផ្គង់ថាមពល: AC380V បីដំណាក់កាល ± 10%, 50Hz ± 1 សីតុណ្ហភាពព័ទ្ធជុំវិញ: 0 ° ~ 45 °
ប្រាំ, ប៉ារ៉ាម៉ែត្របច្ចេកទេសចម្បង:
| គំរូ | BOSM4014 | |
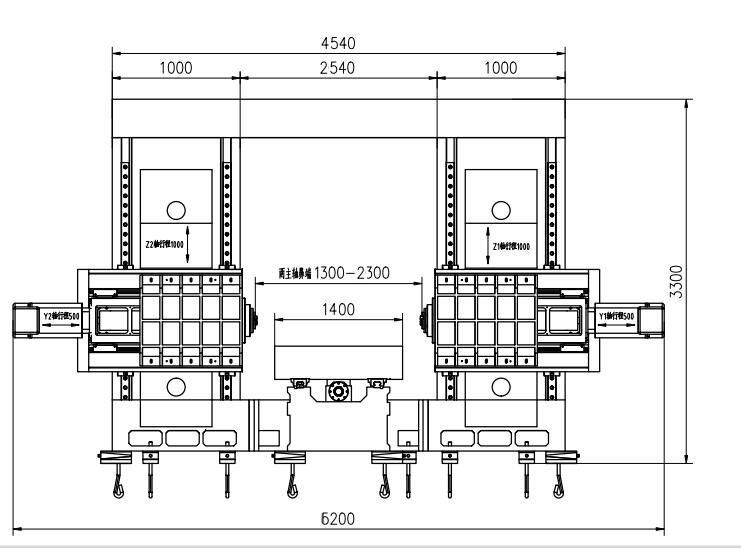
| ទំហំការងារកែច្នៃអតិបរមា | ប្រវែង × ទទឹង × កំពស់ (ម.ម) 4000 × 1600 × 1000 | |
| ចំណីអតិបរមា Gantry | ទទឹង (មម) | ២៣០០ |
| ទំហំតុធ្វើការ | ប្រវែង X ទទឹង (មម) | 4000*1400 |
|
ប្រភេទក្បាលខួងផ្តេក ក្បាលថាមពលមួយពីរ
| បរិមាណ (2) | ២ |
| Spindle taper | BT50 | |
| អង្កត់ផ្ចិតខួង (មម) | Φ2-Φ60 | |
| អង្កត់ផ្ចិត (មម) | M3-M30 | |
| អង្កត់ផ្ចិតឌីសកាត់ (មម) | ៣០០ | |
| ល្បឿន spindle (r/min) | 30-6000 | |
| ថាមពលម៉ូទ័រ servo spindle (kw) | 37 | |
| ចម្ងាយច្រមុះពីកណ្តាលតារាង (មម) | ៦៥០-១១៥០ | |
| ការដាច់សរសៃឈាមខួរក្បាលខាងឆ្វេង និងខាងស្តាំនៃចៀមឈ្មោលតែមួយ (មម) | ៥០០ | |
| ចម្ងាយរវាងកណ្តាលនៃចៀមឈ្មោល និងយន្តហោះនៃតារាង (មម) | 200-1400 | |
| ការកើនឡើង និងចុះក្រោមនៃ ram (mm) | ១២០០ | |
| ភាពអាចធ្វើម្តងទៀត | ៣០០ * ៣០០ ម។ | ± 0.02 |
| វិមាត្រឧបករណ៍ម៉ាស៊ីន | ប្រវែង × ទទឹង × កម្ពស់ (មម) | នេះបើយោងតាមគំនូរ |
| ទំងន់សរុប (t) | (ប្រមាណ) ៣៦ | |
ប៉ារ៉ាម៉ែត្រខាងលើគឺជាប៉ារ៉ាម៉ែត្រនៃការរចនាបឋម។ នៅក្នុងការរចនាជាក់ស្តែង វាអាចមានការផ្លាស់ប្តូរទៅតាមតម្រូវការដំណើរការនៃ workpiece និងតម្រូវការការរចនានៃឧបករណ៍ម៉ាស៊ីន ដើម្បីបំពេញតាមតម្រូវការនៃផ្នែកកែច្នៃរបស់ក្រុមហ៊ុនអ្នក។