






BOSM - ម៉ាស៊ីនខួង និងខួងផ្តេក
1. ការប្រើប្រាស់ឧបករណ៍៖
BOSM horizontal counter drilling and boring machine គឺជាម៉ាស៊ីនពិសេសមួយសម្រាប់ក្រុមហ៊ុនរបស់អ្នកក្នុងការដំណើរការប៉មស្ទូច។ ម៉ាស៊ីននេះត្រូវបានបំពាក់ដោយ 2 សំណុំនៃការខួងផ្តេក និងក្បាលថាមពលគួរឱ្យធុញ ដែលអាចដឹងពីការខួង ការកិន និងការធុញនៃស្នាដៃក្នុងជួរដ៏មានប្រសិទ្ធភាព។ ការកាត់និងដំណើរការផ្សេងទៀត ល្បឿនកំណត់ទីតាំងឧបករណ៍គឺលឿន ភាពត្រឹមត្រូវនៃដំណើរការគឺខ្ពស់ ហើយប្រសិទ្ធភាពនៃដំណើរការគឺខ្ពស់។
2. លក្ខណៈរចនាសម្ព័ន្ធឧបករណ៍៖
2. 1. សមាសធាតុសំខាន់ៗនៃម៉ាស៊ីន
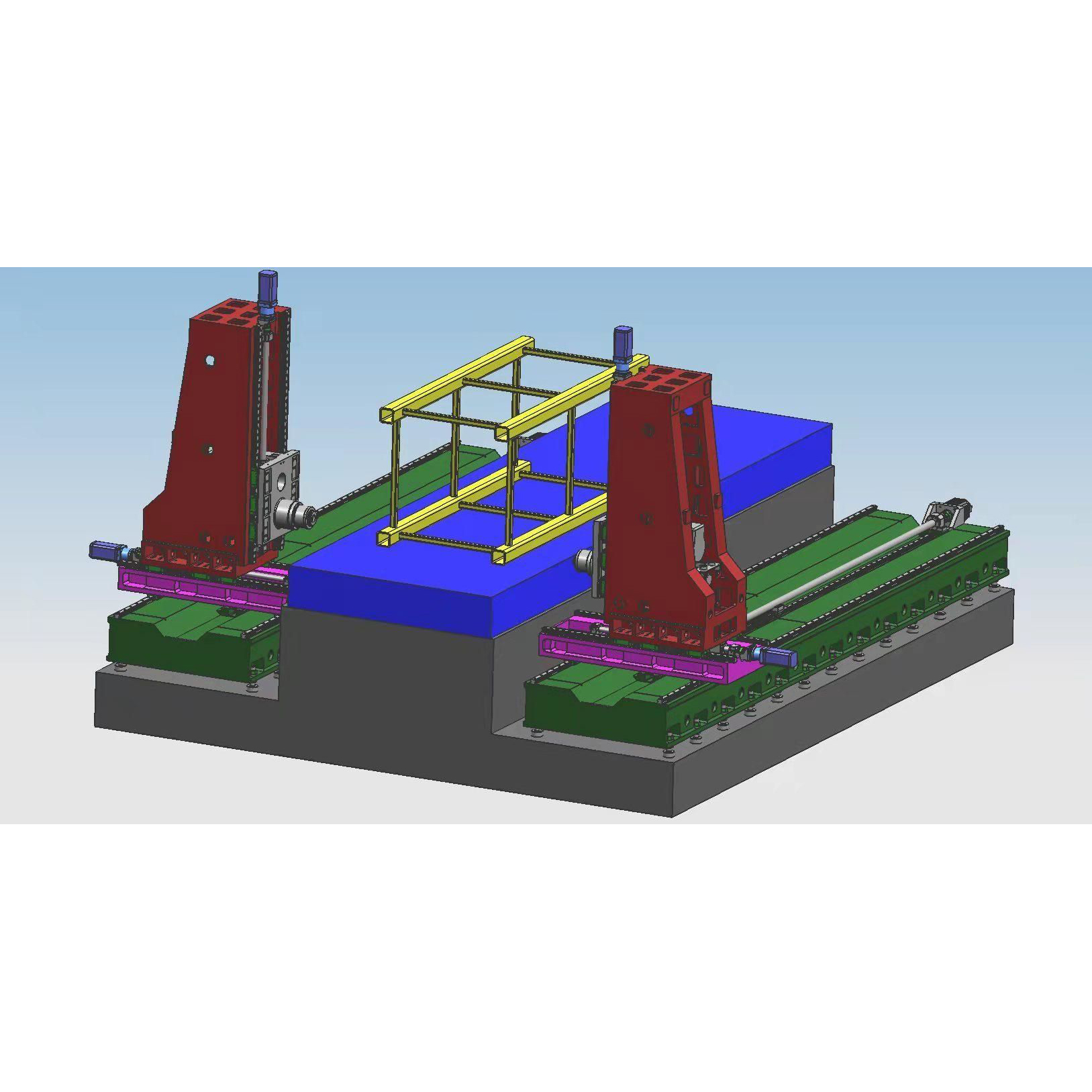
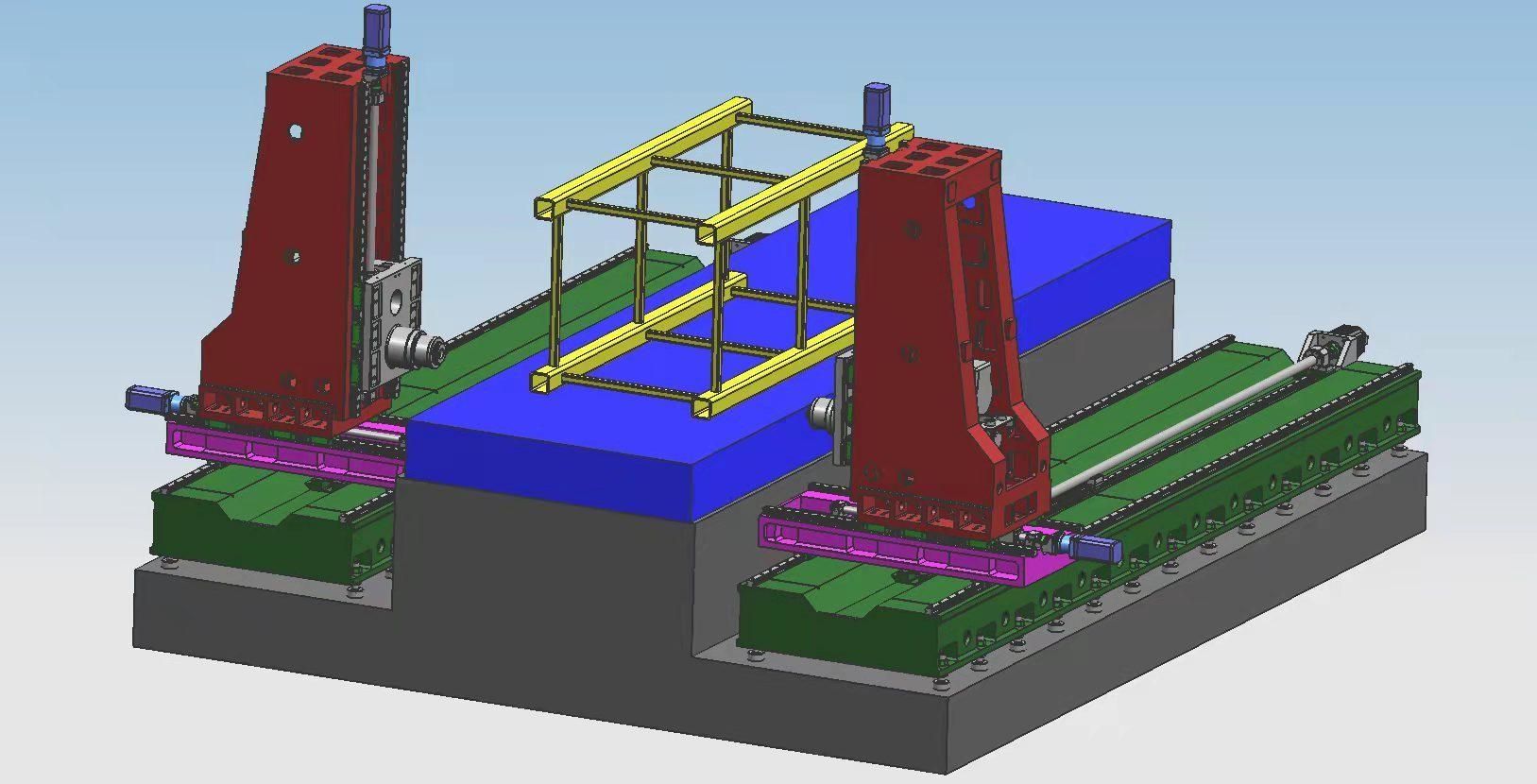
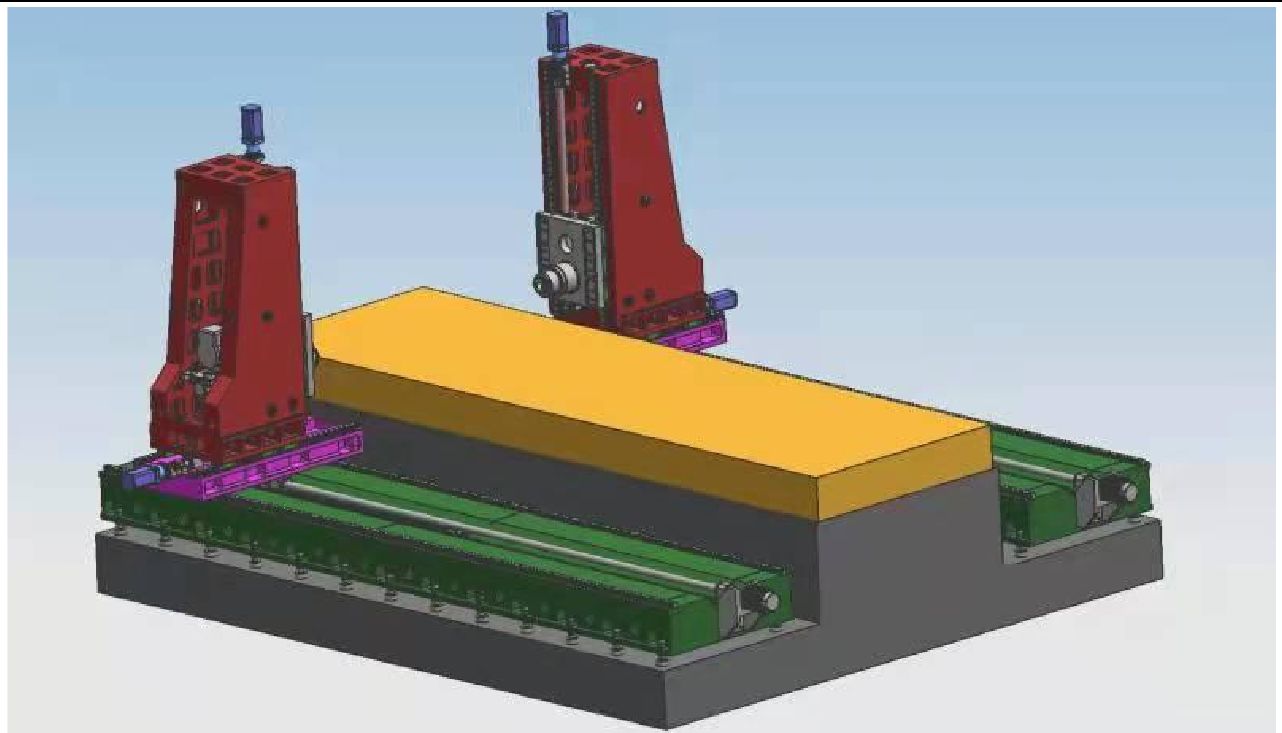
ធាតុផ្សំសំខាន់ៗរបស់ម៉ាស៊ីន៖ គ្រែ តុធ្វើការ ជួរឈរឆ្វេង និងស្តាំ កែប ចៀមឈ្មោល ជាដើម ផ្នែកធំ ៗ ធ្វើពីជ័រខ្សាច់ជ័រ ដែកប្រផេះ គុណភាពខ្ពស់ 250 បោះចោលក្នុងរណ្តៅខ្សាច់ក្តៅ → រំញ័រ → ក្តៅ furnace annealing → vibration aging → Rough machining → vibration aging → furnace annealing → vibration aging → បញ្ចប់ដើម្បីលុបបំបាត់ទាំងស្រុងនូវភាពតានតឹងអវិជ្ជមាននៃផ្នែក និងរក្សាដំណើរការនៃផ្នែកដែលមានស្ថេរភាព។ កៅអីការងាររបស់ឧបករណ៍ត្រូវបានជួសជុល ហើយក្បាលថាមពលទាំងសងខាងអាចផ្លាស់ទីក្នុងទិសដៅខាងមុខ និងខាងក្រោយនៃមូលដ្ឋាន។ ម៉ាស៊ីនមានមុខងារដូចជាការខួង ការធុញ ការរាប់ ការប៉ះ ជាដើម។ វិធីសាស្រ្តនៃការធ្វើឱ្យត្រជាក់របស់ឧបករណ៍គឺការធ្វើឱ្យត្រជាក់ខាងក្នុង បូកនឹងការត្រជាក់ខាងក្រៅ។ ម៉ាស៊ីនមាន 5 អ័ក្សចំណី ក្បាលកាត់ 2 ដែលអាចធ្វើសមកាលកម្មជាមួយ 5 អ័ក្សក្នុងពេលតែមួយ ឬអាចដំណើរការតែមួយ។ ទិសអ័ក្សរបស់ម៉ាស៊ីន និងក្បាលថាមពលត្រូវបានបង្ហាញក្នុងរូបខាងក្រោម។
2. 2 រចនាសម្ព័ន្ធសំខាន់នៃផ្នែកចំណីបញ្ជូនតាមអ័ក្ស
2.2.1 អ័ក្ស X៖ ក្បាលថាមពលច្រាសមកវិញតាមបណ្ដោយផ្លូវណែនាំនៃមូលដ្ឋាន។
ដ្រាយអ័ក្ស X1៖ ម៉ូទ័រ AC servo បូកនឹងឧបករណ៍កាត់បន្ថយភពដែលមានភាពជាក់លាក់ខ្ពស់ត្រូវបានប្រើដើម្បីជំរុញក្បាលថាមពលតាមរយៈដ្រាយវីសបាល់ដើម្បីដឹងពីចលនាលីនេអ៊ែរនៃអ័ក្ស X ។
ការបញ្ជូនតាមអ័ក្ស X2៖ ម៉ូទ័រ AC servo បូកនឹងឧបករណ៍កាត់បន្ថយភពដែលមានភាពជាក់លាក់ខ្ពស់ត្រូវបានប្រើដើម្បីជំរុញក្បាលថាមពលតាមរយៈការបញ្ជូនវីសបាល់ដើម្បីដឹងពីចលនាលីនេអ៊ែរអ័ក្ស X ។
ទម្រង់ផ្លូវដែកមគ្គុទ្ទេសក៍៖ ផ្លូវដែកមគ្គុទ្ទេសក៍លីនេអ៊ែរដែលមានភាពជាក់លាក់កម្លាំងខ្ពស់ពីរត្រូវបានក្រឡាក្បឿងនៅលើមូលដ្ឋានពង្រីក។
2.2 អ័ក្ស Y1៖ ក្បាលថាមពលបង្វិលឡើងលើ និងចុះក្រោមនៅលើជួរឈរ។
ដ្រាយអ័ក្ស Y1៖ ប្រើម៉ូទ័រ AC servo ដើម្បីជំរុញតាមរយៈវីសគ្រាប់បាល់ ដើម្បីដឹងពីចលនាលីនេអ៊ែរនៃអ័ក្ស Y1 ។ ទម្រង់ផ្លូវដែកមគ្គុទ្ទេសក៍: 4 បំណែកនៃ 45 ប្រភេទផ្លូវរថភ្លើងមគ្គុទ្ទេសក៍លីនេអ៊ែរ។
2.2.3 អ័ក្ស Y2៖ ក្បាលថាមពលបង្វិលឡើងលើ និងចុះក្រោមនៅលើជួរឈរ។
ការបញ្ជូនអ័ក្ស Y2៖ ម៉ូទ័រ AC servo ត្រូវបានប្រើដើម្បីជំរុញតាមរយៈវីសគ្រាប់បាល់ ដើម្បីដឹងពីចលនាលីនេអ៊ែរនៃអ័ក្ស Y1 ។
ទម្រង់ផ្លូវដែកមគ្គុទ្ទេសក៍: 4 បំណែកនៃ 45 ប្រភេទផ្លូវរថភ្លើងមគ្គុទ្ទេសក៍លីនេអ៊ែរ។
2.2.4 អ័ក្ស Z1៖ ក្បាលថាមពលបង្វិលទៅវិញទៅមកនៅលើកែប។
ការបញ្ជូនអ័ក្ស Z1៖ ម៉ូទ័រ AC servo និងឧបករណ៍កាត់បន្ថយភពដែលមានភាពជាក់លាក់ខ្ពស់ត្រូវបានប្រើដើម្បីជំរុញចលនាតាមរយៈវីសបាល់ដើម្បីដឹងពីចលនាលីនេអ៊ែរនៃអ័ក្ស Z1 ។
2.2.5 អ័ក្ស Z2៖ ក្បាលថាមពលបង្វិលទៅក្រោយនៅលើកែប។
ការបញ្ជូនអ័ក្ស Z2៖ ម៉ូទ័រ AC servo និងឧបករណ៍កាត់បន្ថយភពដែលមានភាពជាក់លាក់ខ្ពស់ត្រូវបានប្រើដើម្បីជំរុញចលនាតាមរយៈវីសបាល់ដើម្បីដឹងពីចលនាលីនេអ៊ែរអ័ក្ស Z2 ។
2.3. ការដកបន្ទះសៀគ្វីនិងការធ្វើឱ្យត្រជាក់
មានឧបករណ៍បញ្ជូនបន្ទះសៀគ្វីរាបស្មើនៅសងខាងនៅក្រោមតុធ្វើការ ហើយបន្ទះសៀគ្វីដែកអាចត្រូវបានរំសាយទៅក្នុងឧបករណ៍បញ្ជូនបន្ទះឈីបនៅចុងបញ្ចប់ ដើម្បីសម្រេចបាននូវការផលិតប្រកបដោយភាពស៊ីវិល័យ។ មានស្នប់ត្រជាក់នៅក្នុងធុង coolant នៃ chip conveyor ដែលអាចត្រូវបានប្រើសម្រាប់ការត្រជាក់ខាងក្នុង + ភាពត្រជាក់ខាងក្រៅនៃឧបករណ៍ ដើម្បីធានាបាននូវដំណើរការ និងអាយុកាលសេវាកម្មរបស់ឧបករណ៍ ហើយ coolant អាចត្រូវបានកែច្នៃឡើងវិញ។
3. ប្រព័ន្ធគ្រប់គ្រងលេខឌីជីថលពេញលេញ៖
៣.១. ជាមួយនឹងមុខងារបំបែកបន្ទះឈីប ពេលវេលាបំបែកបន្ទះឈីប និងវដ្តនៃការបំបែកបន្ទះឈីបអាចត្រូវបានកំណត់នៅលើចំណុចប្រទាក់ man-machine ។
៣.២. ជាមួយនឹងមុខងារលើកឧបករណ៍ ចម្ងាយលើកឧបករណ៍អាចត្រូវបានកំណត់នៅលើចំណុចប្រទាក់ man-machine ។ នៅពេលដែលបានទៅដល់ចម្ងាយ ឧបករណ៍នឹងត្រូវបានលើកយ៉ាងលឿន ហើយបន្ទាប់មកបន្ទះសៀគ្វីនឹងត្រូវបោះចោល ហើយបន្ទាប់មកលឿនទៅមុខទៅកាន់ផ្ទៃខួង ហើយប្តូរទៅធ្វើការដោយស្វ័យប្រវត្តិ។
៣.២. ប្រអប់ត្រួតពិនិត្យប្រតិបត្តិការកណ្តាល និងអង្គភាពឧបករណ៍យួរដៃទទួលយកប្រព័ន្ធគ្រប់គ្រងលេខ ហើយត្រូវបានបំពាក់ជាមួយចំណុចប្រទាក់ USB និងអេក្រង់ LCD គ្រីស្តាល់រាវ។ ដើម្បីជួយសម្រួលដល់ការសរសេរកម្មវិធី ការផ្ទុក ការបង្ហាញ និងការប្រាស្រ័យទាក់ទង ចំណុចប្រទាក់ប្រតិបត្តិការមានមុខងារដូចជា ការសន្ទនារវាងម៉ាស៊ីន និងម៉ាស៊ីន សំណងកំហុស និងការជូនដំណឹងដោយស្វ័យប្រវត្តិ។
3.2.. គ្រឿងបរិក្ខារមានមុខងារពិនិត្យ និងត្រួតពិនិត្យឡើងវិញនូវទីតាំងរន្ធ មុនពេលដំណើរការ ហើយប្រតិបត្តិការគឺងាយស្រួលណាស់។
4. ប្រេងរំអិលដោយស្វ័យប្រវត្តិ
គូផ្លូវដែកមគ្គុទ្ទេសក៍លីនេអ៊ែរភាពជាក់លាក់របស់ម៉ាស៊ីន គូវីសគ្រាប់បាល់ដែលមានភាពជាក់លាក់ និងគូចលនាដែលមានភាពជាក់លាក់ខ្ពស់ផ្សេងទៀតត្រូវបានបំពាក់ដោយប្រព័ន្ធប្រេងរំអិលដោយស្វ័យប្រវត្តិ។ ស្នប់ប្រេងរំអិលដោយស្វ័យប្រវត្តិបញ្ចេញសម្ពាធប្រេង ហើយអង្គជំនុំជម្រះប្រេងរំអិលបរិមាណចូលទៅក្នុងប្រេង។ នៅពេលដែលអង្គជំនុំជម្រះប្រេងត្រូវបានបំពេញដោយប្រេងហើយសម្ពាធប្រព័ន្ធកើនឡើងដល់ 1.4 ~ 1.75Mpa កុងតាក់សម្ពាធនៅក្នុងប្រព័ន្ធត្រូវបានបិទ ស្នប់ឈប់ ហើយសន្ទះបិទបើកមិនផ្ទុកនៅពេលតែមួយ។ នៅពេលដែលសម្ពាធប្រេងនៅក្នុងផ្លូវធ្លាក់ចុះក្រោម 0.2Mpa បរិមាណប្រេងរំអិលចាប់ផ្តើមបំពេញចំណុចរំអិល ហើយបំពេញការបំពេញប្រេងមួយ។ ដោយសារតែបរិមាណជាក់លាក់នៃប្រេងដែលបានផ្គត់ផ្គង់ដោយ oiler បរិមាណ និងសមត្ថភាពក្នុងការរកឃើញសម្ពាធប្រព័ន្ធ ការផ្គត់ផ្គង់ប្រេងគឺអាចទុកចិត្តបាន និងធានាថាមានខ្សែភាពយន្តប្រេងនៅលើផ្ទៃនៃគូ kinematic នីមួយៗ ដែលកាត់បន្ថយការកកិត និងការពាក់ និងការពារការខូចខាត។ ដល់រចនាសម្ព័ន្ធខាងក្នុងដែលបណ្តាលមកពីការឡើងកំដៅ។ ដើម្បីធានាបាននូវភាពត្រឹមត្រូវ និងអាយុកាលរបស់ម៉ាស៊ីន។
5. ម៉ាស៊ីនបរិស្ថានប្រើប្រាស់៖
ការផ្គត់ផ្គង់ថាមពល៖ AC380V ± 10%, 50Hz ± 1 ដំណាក់កាល សីតុណ្ហភាពព័ទ្ធជុំវិញ: -10 ° ~ 45 °
6. លក្ខណៈវិនិច្ឆ័យទទួលយក៖
JB/T10051-1999 "លក្ខណៈបច្ចេកទេសទូទៅសម្រាប់ប្រព័ន្ធធារាសាស្ត្រនៃម៉ាស៊ីនកាត់ដែក"
7. ប៉ារ៉ាម៉ែត្របច្ចេកទេស:
| គំរូ | 2050-5Z | |
| ទំហំការងារកែច្នៃអតិបរមា | ប្រវែង×ទទឹង×កំពស់ (មម) | 5000 × 2000 × 1500 |
| ទំហំតុធ្វើការ | ប្រវែង X ទទឹង (មម) | 5000*2000 |
| ទិសដៅទិសដៅនៃក្បាលថាមពល | ផ្លាស់ទីទៅមុខ (ម. | ៥០០០ |
| ថាមពលក្បាលឡើងលើចុះក្រោម | ការកើនឡើង និងចុះក្រោមនៃ ram (mm) | ១៥០០ |
|
Horizontal ram type drilling power head ក្បាលថាមពល ១ ២ | បរិមាណ (2 ភី។ ) | ២ |
| Spindle taper | BT50 | |
| អង្កត់ផ្ចិតខួង (មម) | Φ2-Φ60 | |
| អង្កត់ផ្ចិត (មម) | M3-M30 | |
| ល្បឿន spindle (r/min) | 30-3000 | |
| ថាមពលម៉ូទ័រ servo spindle (kw) | ២២*២ | |
| ការធ្វើដំណើរឆ្វេង និងស្តាំ (ម.ម.) | ៦០០ | |
| ភាពត្រឹមត្រូវនៃទីតាំងទ្វេទិស | ៣០០ * ៣០០ ម។ | ± 0.025 |
| ភាពត្រឹមត្រូវនៃការដាក់ទីតាំងដដែលៗទ្វេទិស | ៣០០ * ៣០០ ម។ | ± 0.02 |





