ម៉ាស៊ីនកិន BOSM -6025 ក្បាលទល់មុខ
1. បរិក្ខារប្រើ៖
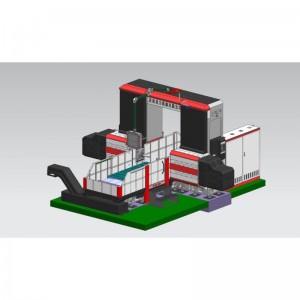
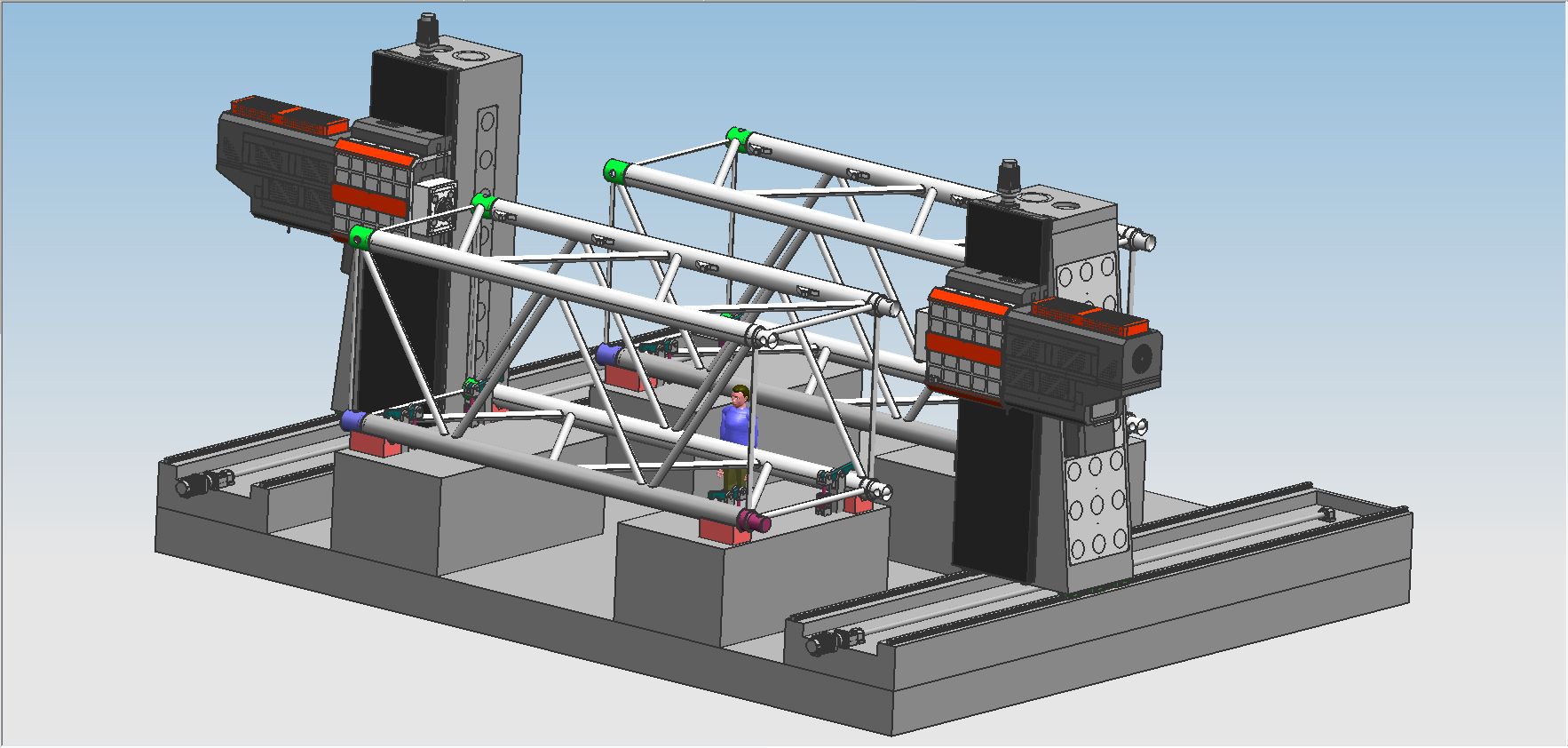
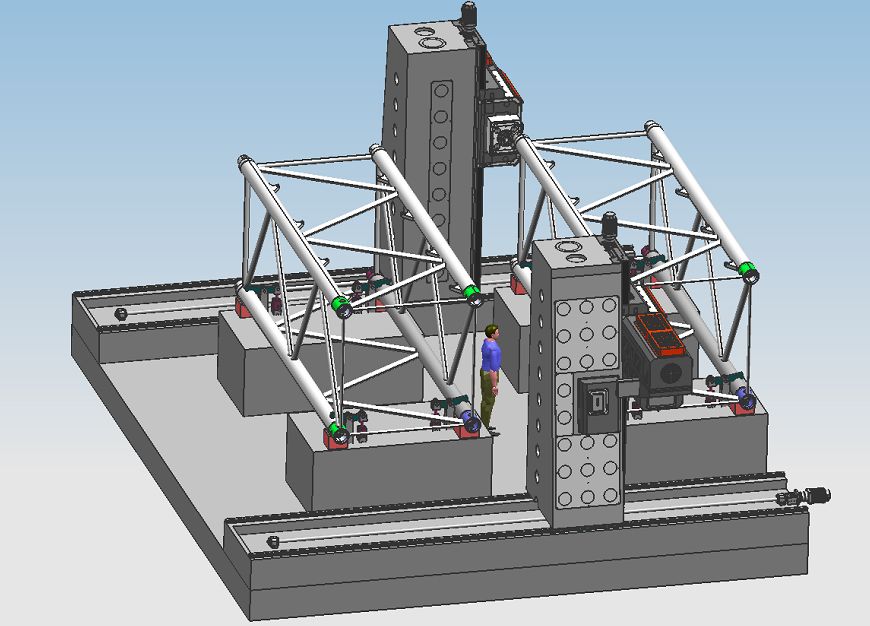
ស្ថានីយ៍ទ្វេរដង BOSM-6025, CNC ជួរឈរបញ្ឈរដែលអាចផ្លាស់ទីបាន ជួរឈរទ្វេពីក្បាលទៅក្បាលគួរឱ្យធុញនិងម៉ាស៊ីនកិនគឺជាឧបករណ៍ម៉ាស៊ីនពិសេសសម្រាប់ workpieces ស៊ីមេទ្រីនៃម៉ាស៊ីនសំណង់។ឧបករណ៍ម៉ាស៊ីនត្រូវបានបំពាក់ដោយជួរឈរដែលអាចចល័តបានពិសេស និងពីរសំណុំនៃចៀមឈ្មោលផ្តេក ដែលអាចដឹងពីការខួង ការកិន ការធុញ និងដំណើរការផ្សេងទៀតនៃ workpiece ក្នុងជួរដ៏មានប្រសិទ្ធភាព ដុំការងារអាចដំណើរការបានក្នុងពេលតែមួយ (មិនត្រូវការ សម្រាប់ការតោងបន្ទាប់បន្សំ) ល្បឿនផ្ទុក និងការផ្ទុកលឿន ល្បឿនកំណត់ទីតាំងរហ័ស ភាពត្រឹមត្រូវនៃដំណើរការខ្ពស់ និងប្រសិទ្ធភាពដំណើរការខ្ពស់។
២. រចនាសម្ព័ន្ធឧបករណ៍៖
2.1. សមាសធាតុសំខាន់នៃឧបករណ៍ម៉ាស៊ីន
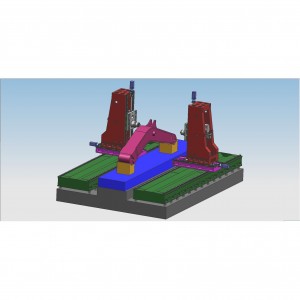
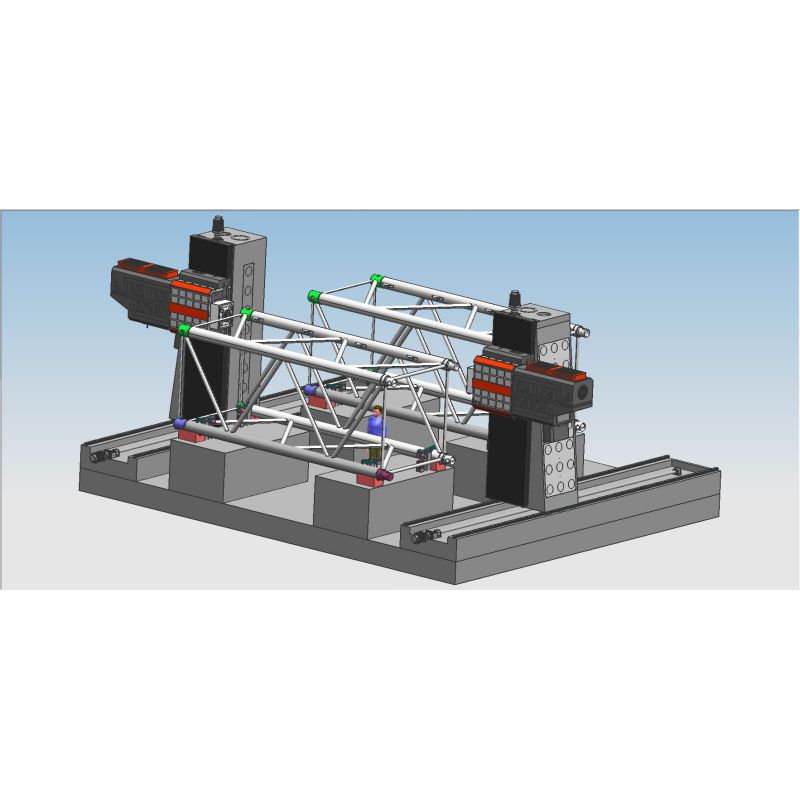
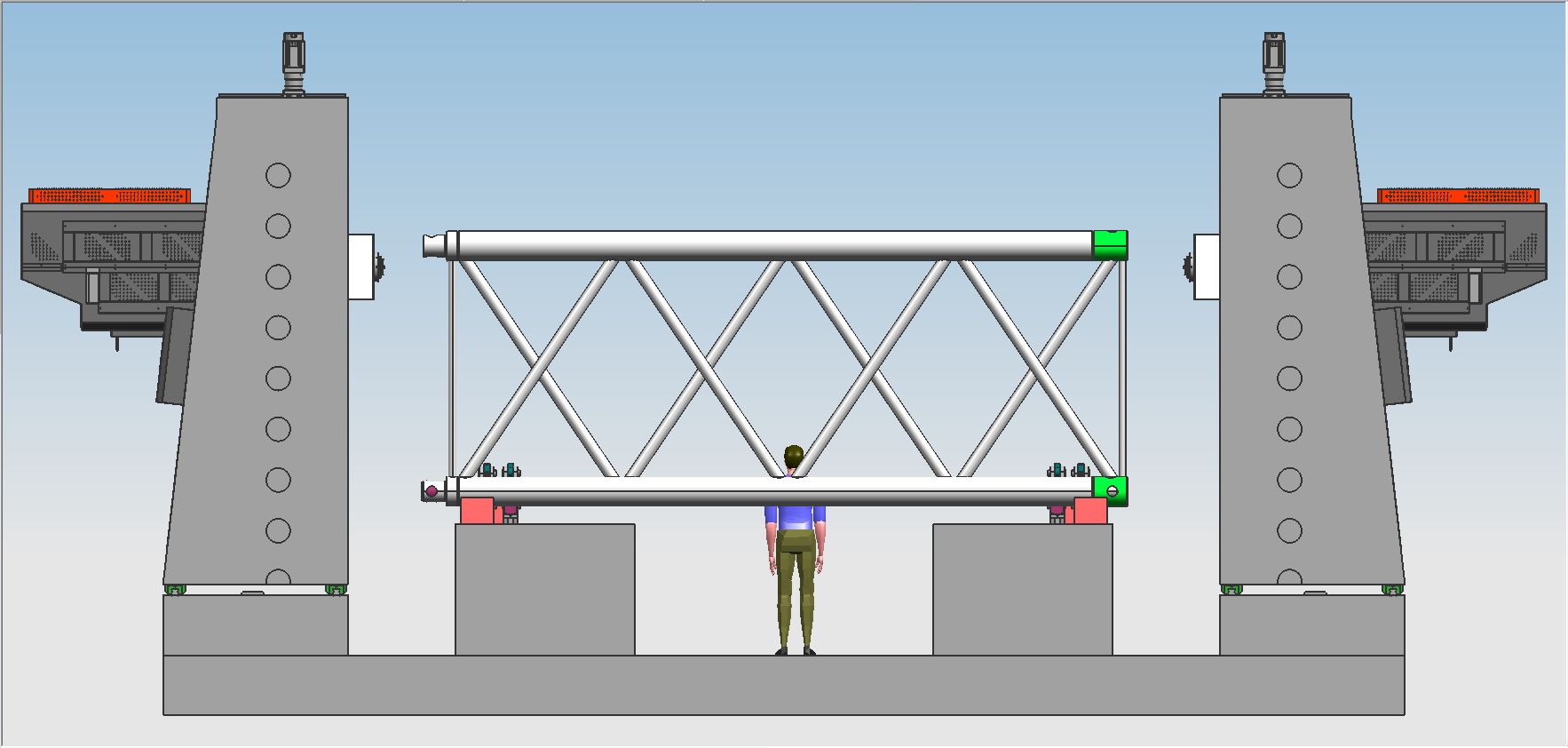
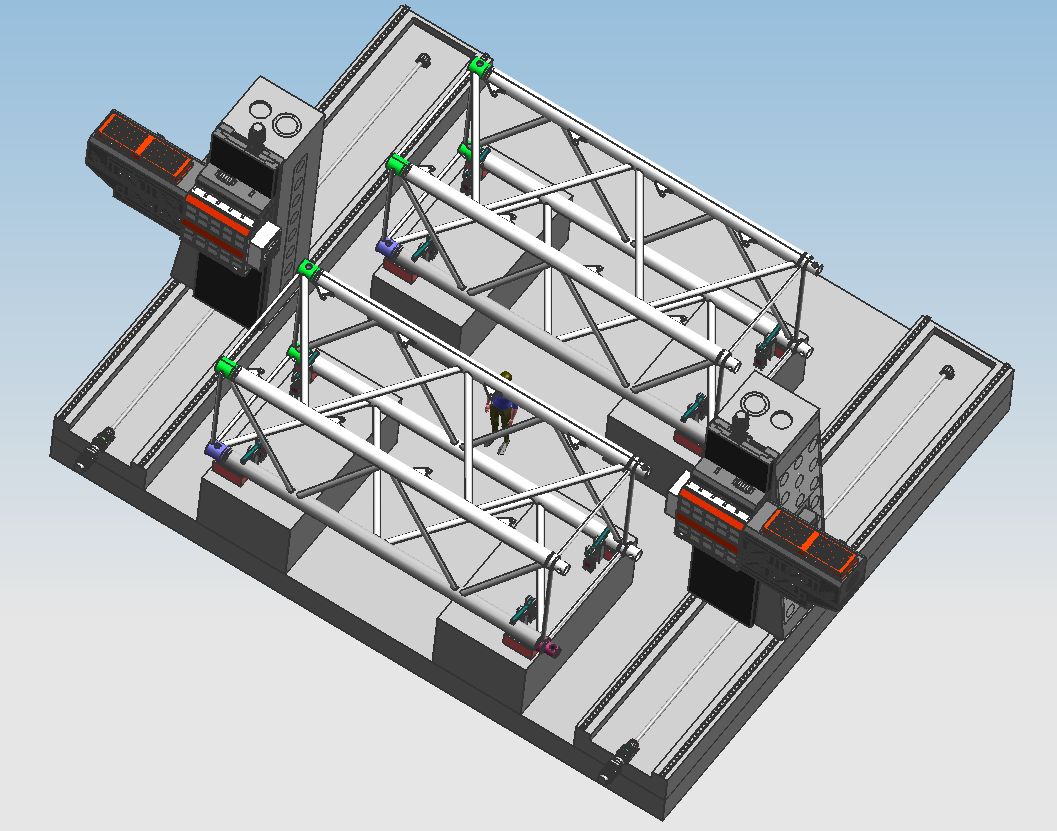
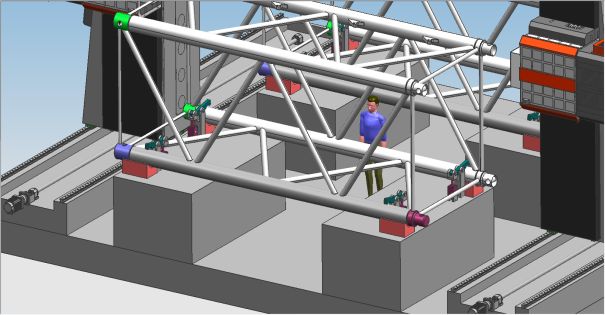
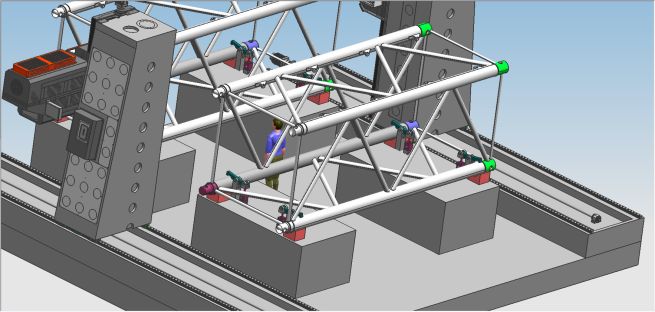
គ្រែ កៅអីអង្គុយ សសរឆ្វេង និងស្តាំ ធ្នឹម កៅអី ចៀមឈ្មោល និងផ្នែកធំៗផ្សេងទៀត សុទ្ធតែធ្វើពីជ័រខ្សាច់ជ័រ ដែកប្រផេះ គុណភាពខ្ពស់ 250 បោះចោលក្នុងរណ្តៅខ្សាច់ក្តៅ → រំញ័រ → កំដៅ furnace annealing → រំញ័រ → គ្រឿងម៉ាស៊ីនរដុប → ភាពចាស់នៃរំញ័រ → កំដៅ furnace annealing → vibration aging → បញ្ចប់ លុបបំបាត់ទាំងស្រុងនូវភាពតានតឹងអវិជ្ជមាននៃផ្នែក និងរក្សាដំណើរការនៃផ្នែកមានស្ថេរភាព។ឧបករណ៍ម៉ាស៊ីនមានមុខងារដូចជា កិន, ធុញ, ខួង, countersinking, tapping, ល. ហើយវិធី cooling tool គឺ exter cooling, the machine machine has 6 feed axes ដែលអាចដឹងពីតំណភ្ជាប់ 4-axis និង 6-axis single- សកម្មភាព។មានក្បាលថាមពល 2 ។ទិសអ័ក្សរបស់ឧបករណ៍ម៉ាស៊ីន និងក្បាលថាមពលត្រូវបានបង្ហាញក្នុងរូបខាងក្រោម។
2. ២រចនាសម្ព័ន្ធសំខាន់នៃផ្នែកចំណីបញ្ជូនតាមអ័ក្ស
2.2.1 X 1/X2 axis: ជួរឈរ reciprocates បណ្តោយតាមបណ្តោយផ្លូវរថភ្លើងណែនាំនៃគ្រែថេរ។
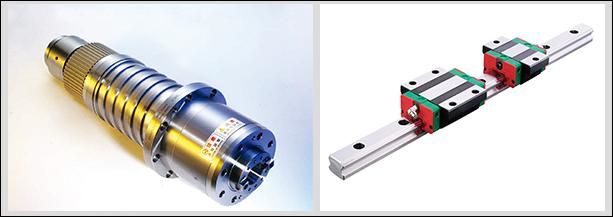
ការបញ្ជូនអ័ក្ស X៖ ម៉ូទ័រ AC servo និងឧបករណ៍កាត់បន្ថយភពដែលមានភាពជាក់លាក់ខ្ពស់ត្រូវបានប្រើដើម្បីជំរុញជួរឈរទាំងពីរតាមរយៈការបញ្ជូនវីសបាល់ដើម្បីដឹងពីចលនាលីនេអ៊ែរនៃអ័ក្ស X ។
ទម្រង់ផ្លូវដែកមគ្គុទ្ទេសក៍៖ ដាក់ផ្លូវដែកមគ្គុទ្ទេសក៍លីនេអ៊ែរដែលមានភាពជាក់លាក់ខ្លាំងពីរ។
2.2.2 អ័ក្ស Y1៖ ក្បាលថាមពល និង ram ត្រូវបានតំឡើងបញ្ឈរនៅផ្នែកខាងមុខនៃជួរឈរ ហើយច្រាសមកវិញទាំងឆ្វេង និងស្តាំតាមបណ្តោយផ្លូវណែនាំនៃជួរឈរ។
ការបញ្ជូនតាមអ័ក្ស Y1៖ ម៉ូទ័រ AC servo ត្រូវបានប្រើដើម្បីជំរុញវីសបាល់ដើម្បីជំរុញការកែឆ្នៃដើម្បីផ្លាស់ទី និងដឹងពីចលនាលីនេអ៊ែរអ័ក្ស Y1។
ទម្រង់ផ្លូវដែកមគ្គុទ្ទេសក៍៖ ផ្លូវដែកមគ្គុទ្ទេសក៍លីនេអ៊ែរចំនួន ៤ + ផ្លូវដែករឹងរួមផ្សំ។
2.2.3 អ័ក្ស Y2៖ រ៉ាមទីពីរនៃក្បាលថាមពលត្រូវបានតំឡើងបញ្ឈរនៅផ្នែកខាងមុខនៃជួរឈរ ហើយច្រាសមកវិញទាំងឆ្វេង និងស្តាំតាមបណ្តោយផ្លូវណែនាំនៃជួរឈរ។
ការបញ្ជូនតាមអ័ក្ស Y2៖ ម៉ូទ័រ AC servo ត្រូវបានប្រើដើម្បីជំរុញវីសគ្រាប់បាល់ ដើម្បីជំរុញអាបឱ្យផ្លាស់ទី និងដឹងពីចលនាលីនេអ៊ែរអ័ក្ស Y2។
ទម្រង់ផ្លូវដែកមគ្គុទ្ទេសក៍៖ ផ្លូវដែកមគ្គុទ្ទេសក៍លីនេអ៊ែរចំនួន ៤ + ផ្លូវដែករឹងរួមផ្សំ។
2.2.4 អ័ក្ស Z1៖ ក្បាលម៉ាស៊ីនរុញក្បាលថាមពលត្រូវបានតំឡើងបញ្ឈរនៅផ្នែកខាងមុខនៃជួរឈរខាងស្តាំ ហើយច្រាសឡើងលើ និងចុះក្រោមតាមបណ្តោយផ្លូវដែកណែនាំជួរឈរ។
ការបញ្ជូនតាមអ័ក្ស Z1៖ ម៉ូទ័រ AC servo និងឧបករណ៍កាត់បន្ថយភពដែលមានភាពជាក់លាក់ខ្ពស់ត្រូវបានប្រើដើម្បីជំរុញ ram ដើម្បីផ្លាស់ទីតាមវីសបាល់ដើម្បីដឹងពីចលនាលីនេអ៊ែរ Z1 ។
ទម្រង់ផ្លូវដែកមគ្គុទ្ទេសក៍៖ ផ្លូវដែកមគ្គុទ្ទេសក៍លីនេអ៊ែរចំនួន ២ ។
2.2.5 អ័ក្ស Z2៖ បន្ទះស្លាយក្បាលថាមពលត្រូវបានតំឡើងបញ្ឈរនៅផ្នែកខាងមុខនៃជួរឈរខាងស្តាំ ហើយភ្ជាប់ឡើងលើ និងចុះក្រោមតាមបណ្តោយផ្លូវដែកណែនាំជួរឈរ។
ការបញ្ជូនតាមអ័ក្ស Z1៖ ម៉ូទ័រ AC servo បូកនឹងឧបករណ៍កាត់បន្ថយភពដែលមានភាពជាក់លាក់ខ្ពស់ត្រូវបានប្រើដើម្បីជំរុញ ram ដើម្បីផ្លាស់ទីតាមវីសបាល់ដើម្បីដឹងពីចលនាលីនេអ៊ែរ Z2 ។
ទម្រង់ផ្លូវដែកមគ្គុទ្ទេសក៍៖ ផ្លូវដែកមគ្គុទ្ទេសក៍លីនេអ៊ែរចំនួន ២
ក្បាលថាមពលដែលគួរឱ្យធុញ និងកិន (រួមទាំងក្បាលថាមពល 1 និង 2) គឺជា ram ការ៉េបរិវេណ ហើយទិសដៅផ្លាស់ទីត្រូវបានដឹកនាំដោយ 4 ផ្លូវដែក roller លីនេអ៊ែរ។ដ្រាយប្រើម៉ូទ័រ AC servo ដើម្បីជំរុញគូវីសគ្រាប់បាល់ដែលមានភាពជាក់លាក់។ម៉ាស៊ីននេះត្រូវបានបំពាក់ដោយរបារតុល្យភាពអាសូត។, កាត់បន្ថយសមត្ថភាពទ្រនាប់នៃក្បាលម៉ាស៊ីននៅលើវីសនិងម៉ូទ័រ servo ។ម៉ូទ័រអ័ក្ស Z មានមុខងារហ្វ្រាំងដោយស្វ័យប្រវត្តិ។ក្នុងករណីដាច់ភ្លើង ហ្រ្វាំងស្វ័យប្រវត្តិនឹងទប់ម៉ូទ័រឱ្យតឹងដើម្បីកុំឱ្យវាបង្វិលបាន។នៅពេលធ្វើការ, នៅពេលដែលឧបករណ៍ខួងមិនប៉ះ workpiece, វានឹងចិញ្ចឹមយ៉ាងលឿន;នៅពេលដែលឧបករណ៍ខួងប៉ះនឹងកន្លែងធ្វើការ វានឹងប្តូរទៅជាចំណីដែលកំពុងដំណើរការដោយស្វ័យប្រវត្តិ។នៅពេលដែលប៊ីតខួងចូលទៅក្នុង workpiece វានឹងប្តូរដោយស្វ័យប្រវត្តិទៅជាការបង្វិលយ៉ាងលឿន;នៅពេលដែលចុងបញ្ចប់នៃការខួងចាកចេញពី workpiece និងឈានដល់ទីតាំងដែលបានកំណត់, វានឹងផ្លាស់ទីទៅទីតាំងរន្ធបន្ទាប់ដើម្បីដឹងថាឈាមរត់ដោយស្វ័យប្រវត្តិ។ហើយវាអាចដឹងពីមុខងារនៃការខួងរន្ធពិការភ្នែក ការកិន ការកិន ការបំបែកបន្ទះឈីប ការដកបន្ទះឈីបដោយស្វ័យប្រវត្តិ។ល។ ដែលធ្វើអោយប្រសើរឡើងនូវផលិតភាពការងារ។


ក្បាលថាមពល ram ការ៉េ 500mm stroke ប្រើមគ្គុទ្ទេសក៍លីនេអ៊ែរជំនួសឱ្យការបញ្ចូលបែបប្រពៃណី ដើម្បីបង្កើនភាពត្រឹមត្រូវនៃការដឹកនាំ ខណៈពេលដែលរក្សាបាននូវភាពរឹងរបស់ ram ការ៉េ។
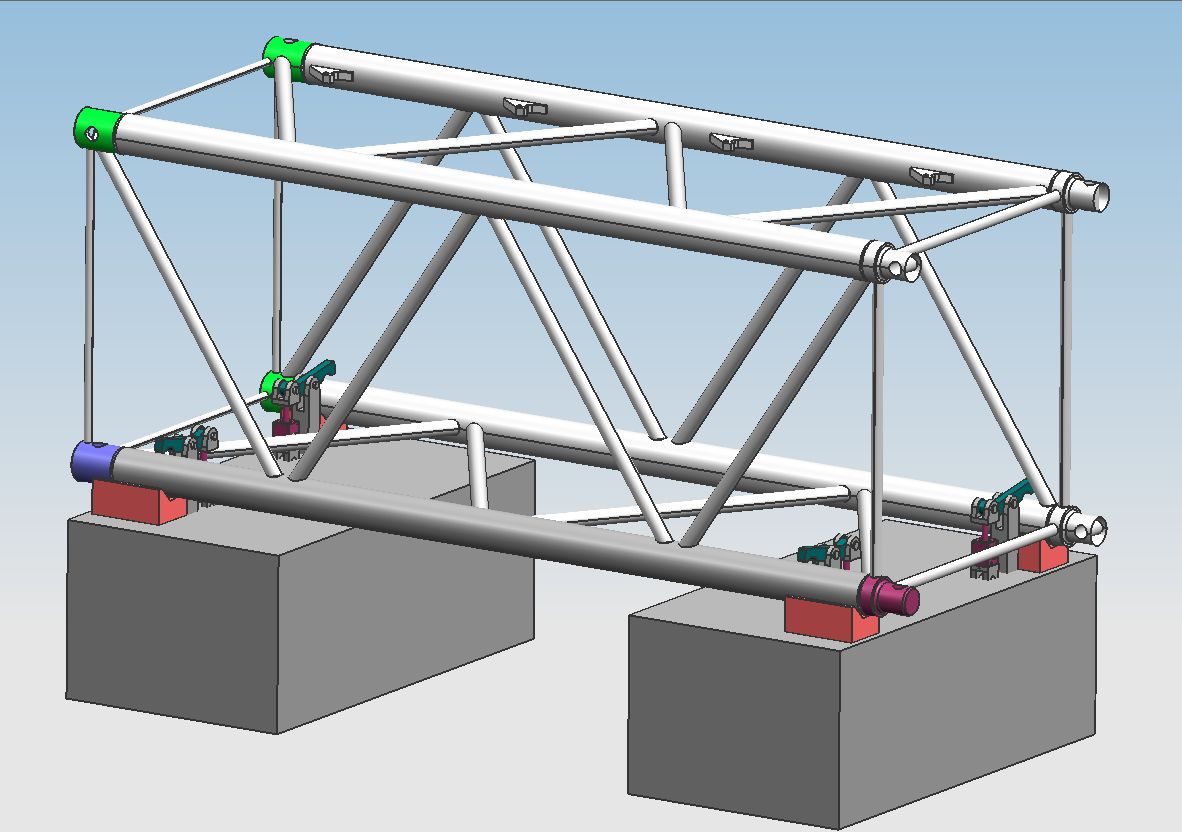
2.3. មុខងាររឹតបន្តឹងធារាសាស្ត្រ workpiece
២.៤ការដកបន្ទះសៀគ្វីនិងត្រជាក់
មានឧបករណ៍បញ្ជូនបន្ទះសៀគ្វី និងខ្សែសង្វាក់រាបស្មើនៅលើភាគីទាំងសងខាងនៅខាងក្រោមកន្លែងធ្វើការ ហើយបន្ទះសៀគ្វីអាចត្រូវបានរំសាយដោយស្វ័យប្រវត្តិទៅកាន់ឧបករណ៍បញ្ជូនបន្ទះឈីបនៅចុងបញ្ចប់តាមរយៈដំណាក់កាលពីរនៃវង់ និងបន្ទះខ្សែសង្វាក់ ដើម្បីសម្រេចបាននូវផលិតកម្មស៊ីវិល័យ។មានស្នប់ត្រជាក់នៅក្នុងធុង coolant នៃ chip conveyor ដែលអាចត្រូវបានប្រើសម្រាប់ការត្រជាក់ខាងក្រៅនៃឧបករណ៍ ដើម្បីធានាបាននូវដំណើរការ និងអាយុកាលសេវាកម្មរបស់ឧបករណ៍ ហើយ coolant អាចត្រូវបានកែច្នៃឡើងវិញ។
3. ប្រព័ន្ធគ្រប់គ្រងលេខឌីជីថលពេញលេញ៖
៣.១.ជាមួយនឹងមុខងារបំបែកបន្ទះឈីប ពេលវេលាបំបែកបន្ទះឈីប និងវដ្តនៃការបំបែកបន្ទះឈីបអាចត្រូវបានកំណត់នៅលើចំណុចប្រទាក់ man-machine ។
៣.២.ជាមួយនឹងមុខងារលើកឧបករណ៍ ចម្ងាយលើកឧបករណ៍អាចត្រូវបានកំណត់នៅលើចំណុចប្រទាក់ man-machine ។នៅពេលដែលដំណើរការឈានដល់ចម្ងាយនេះ ឧបករណ៍នឹងត្រូវបានលើកយ៉ាងលឿន បន្ទាប់មកបន្ទះសៀគ្វីនឹងត្រូវបានបោះចោល ហើយបន្ទាប់មកយ៉ាងលឿនឆ្ពោះទៅមុខផ្ទៃខួង ហើយប្តូរទៅដំណើរការដោយស្វ័យប្រវត្តិ។
៣.៣.ប្រអប់ត្រួតពិនិត្យប្រតិបត្តិការកណ្តាល និងអង្គភាពឧបករណ៍យួរដៃទទួលយកប្រព័ន្ធគ្រប់គ្រងលេខ ហើយត្រូវបានបំពាក់ជាមួយចំណុចប្រទាក់ USB និងអេក្រង់ LCD គ្រីស្តាល់រាវ។ដើម្បីជួយសម្រួលដល់ការសរសេរកម្មវិធី ការផ្ទុក ការបង្ហាញ និងការប្រាស្រ័យទាក់ទង ចំណុចប្រទាក់ប្រតិបត្តិការមានមុខងារដូចជា ការសន្ទនារវាងម៉ាស៊ីន និងម៉ាស៊ីន សំណងកំហុស និងការជូនដំណឹងដោយស្វ័យប្រវត្តិ។
៣.៤.គ្រឿងបរិក្ខារមានមុខងារមើលជាមុន និងត្រួតពិនិត្យឡើងវិញនូវទីតាំងរន្ធមុននឹងដំណើរការ ហើយប្រតិបត្តិការគឺងាយស្រួលណាស់។
4.ប្រេងរំអិលដោយស្វ័យប្រវត្តិ
ឧបករណ៍ម៉ាស៊ីន គូផ្លូវដែកមគ្គុទ្ទេសក៍លីនេអ៊ែរភាពជាក់លាក់ គូវីសគ្រាប់បាល់ដែលមានភាពជាក់លាក់ និងគូចលនាដែលមានភាពជាក់លាក់ខ្ពស់ផ្សេងទៀតត្រូវបានបំពាក់ដោយប្រព័ន្ធប្រេងរំអិលដោយស្វ័យប្រវត្តិ។ស្នប់ប្រេងរំអិលដោយស្វ័យប្រវត្តិបញ្ចេញសម្ពាធប្រេង ហើយអង្គជំនុំជម្រះប្រេងរំអិលបរិមាណចូលទៅក្នុងប្រេង។បន្ទាប់ពីអង្គជំនុំជម្រះប្រេងត្រូវបានបំពេញដោយប្រេងនៅពេលដែលសម្ពាធប្រព័ន្ធកើនឡើងដល់ 1.4-1.75Mpa កុងតាក់សម្ពាធនៅក្នុងប្រព័ន្ធត្រូវបានបិទ ស្នប់ឈប់ ហើយសន្ទះបិទបើកដំណើរការនៅពេលតែមួយ។នៅពេលដែលសម្ពាធប្រេងនៅក្នុងផ្លូវធ្លាក់ចុះក្រោម 0.2Mpa បរិមាណប្រេងរំអិលចាប់ផ្តើមបំពេញចំណុចរំអិល ហើយបំពេញការបំពេញប្រេងមួយ។ដោយសារតែការផ្គត់ផ្គង់ប្រេងត្រឹមត្រូវនៃម៉ាស៊ីនចាក់ប្រេងក្នុងបរិមាណ និងការរកឃើញសម្ពាធប្រព័ន្ធ ការផ្គត់ផ្គង់ប្រេងអាចទុកចិត្តបាន ដោយធានាថាមានខ្សែភាពយន្តប្រេងនៅលើផ្ទៃនៃគូ kinematic នីមួយៗ កាត់បន្ថយការកកិត និងការពាក់ និងការពារការខូចខាតដល់ រចនាសម្ព័ន្ធខាងក្នុងដែលបណ្តាលមកពីការឡើងកំដៅខ្លាំង ដើម្បីធានាបាននូវភាពត្រឹមត្រូវ និងអាយុកាលរបស់ឧបករណ៍ម៉ាស៊ីន។បើប្រៀបធៀបជាមួយនឹងគូផ្លូវដែកមគ្គុទ្ទេសក៍រអិល គូផ្លូវដែកមគ្គុទ្ទេសក៍លីនេអ៊ែរវិលដែលប្រើក្នុងឧបករណ៍ម៉ាស៊ីននេះមានគុណសម្បត្តិជាច្រើន៖
① ភាពប្រែប្រួលនៃចលនាខ្ពស់ មេគុណកកិតនៃផ្លូវដែកមគ្គុទ្ទេសក៍វិលគឺតូចត្រឹមតែ 0.0025-0.01 ហើយថាមពលនៃការបើកបរត្រូវបានកាត់បន្ថយយ៉ាងខ្លាំង ដែលស្មើនឹង 1 នៃម៉ាស៊ីនធម្មតាប៉ុណ្ណោះ។/១០.② ភាពខុសគ្នារវាងការកកិតថាមវន្ត និងឋិតិវន្តគឺតូចណាស់ ហើយដំណើរការតាមដានគឺល្អឥតខ្ចោះ ពោលគឺចន្លោះពេលរវាងសញ្ញាបើកបរ និងសកម្មភាពមេកានិកគឺខ្លីបំផុត ដែលអំណោយផលដល់ការកែលម្អល្បឿនឆ្លើយតប និងភាពប្រែប្រួលនៃ ប្រព័ន្ធគ្រប់គ្រងលេខ។
③វាស័ក្តិសមសម្រាប់ចលនាលីនេអ៊ែរដែលមានល្បឿនលឿន ហើយល្បឿនភ្លាមៗរបស់វាគឺខ្ពស់ជាងប្រហែល 10 ដងនៃផ្លូវរអិល។④ វាអាចដឹងពីចលនាគ្មានចន្លោះ និងធ្វើអោយប្រសើរឡើងនូវភាពរឹងនៃចលនានៃប្រព័ន្ធមេកានិក។⑤ផលិតដោយអ្នកផលិតដែលមានជំនាញវិជ្ជាជីវៈ វាមានភាពជាក់លាក់ខ្ពស់ ភាពបត់បែនល្អ និងការថែទាំងាយស្រួល។
5.ការត្រួតពិនិត្យឡាស៊ែរអ័ក្ស៖
ម៉ាស៊ីននិមួយៗរបស់ Bosman ត្រូវបានក្រិតតាមខ្នាតដោយ laser interferometer របស់ក្រុមហ៊ុន RENISHAW នៅចក្រភពអង់គ្លេស ដើម្បីត្រួតពិនិត្យយ៉ាងត្រឹមត្រូវ និងទូទាត់សងនូវកំហុសឆ្គង ជម្រេ backlash ភាពត្រឹមត្រូវនៃទីតាំង ភាពត្រឹមត្រូវនៃទីតាំងដដែលៗ ជាដើម។ ម៉ាស៊ីន។ការត្រួតពិនិត្យ Ballbar ម៉ាស៊ីននីមួយៗប្រើ ballbar ពីក្រុមហ៊ុន RENISHAW របស់អង់គ្លេស ដើម្បីក្រិតភាពត្រឹមត្រូវនៃរង្វង់ពិត និងភាពត្រឹមត្រូវធរណីមាត្ររបស់ម៉ាស៊ីន ហើយធ្វើការពិសោធន៍កាត់រាងជារង្វង់ក្នុងពេលតែមួយ ដើម្បីធានាបាននូវភាពត្រឹមត្រូវនៃម៉ាស៊ីន 3D និងភាពត្រឹមត្រូវរាងជារង្វង់របស់ម៉ាស៊ីន។


6.បរិស្ថានឧបករណ៍ម៉ាស៊ីន៖
៦.១.តម្រូវការបរិស្ថាននៃការប្រើប្រាស់ឧបករណ៍
ការរក្សាបាននូវកម្រិតថេរនៃសីតុណ្ហភាពព័ទ្ធជុំវិញ គឺជាកត្តាសំខាន់សម្រាប់ម៉ាស៊ីនដែលមានភាពជាក់លាក់។
(1) តម្រូវការសីតុណ្ហភាពព័ទ្ធជុំវិញដែលអាចប្រើបានគឺ -10 ℃ ~ 35 ℃, នៅពេលដែលសីតុណ្ហភាពព័ទ្ធជុំវិញគឺ 20 ℃, សំណើមគួរតែមាន 40 ~ 75% ។
(2) ដើម្បីរក្សាភាពត្រឹមត្រូវឋិតិវន្តនៃឧបករណ៍ម៉ាស៊ីនក្នុងជួរដែលបានបញ្ជាក់ សីតុណ្ហភាពព័ទ្ធជុំវិញល្អបំផុតទាមទារពី 15°C ទៅ 25°C និងភាពខុសគ្នានៃសីតុណ្ហភាព។
មិនត្រូវលើសពី ±2°C/24h។
៦.១.២.វ៉ុលផ្គត់ផ្គង់ថាមពល: 3 ដំណាក់កាល 380V ក្នុងចន្លោះវ៉ុល±10% វ៉ុលផ្គត់ផ្គង់ប្រេកង់: 50HZ ។
៦.១.៣.ប្រសិនបើវ៉ុលនៅក្នុងតំបន់នៃការប្រើប្រាស់មិនស្ថិតស្ថេរ ឧបករណ៍ម៉ាស៊ីនគួរតែត្រូវបានបំពាក់ដោយការផ្គត់ផ្គង់ថាមពលដែលមានស្ថេរភាព ដើម្បីធានាបាននូវប្រតិបត្តិការធម្មតារបស់ឧបករណ៍ម៉ាស៊ីន។
៦.១.៤.ឧបករណ៍ម៉ាស៊ីនគួរតែមានដីដែលអាចទុកចិត្តបាន៖ ខ្សែដីគឺជាខ្សែស្ពាន់ អង្កត់ផ្ចិតខ្សែមិនគួរតិចជាង 10mm² ហើយភាពធន់នឹងដីគួរតែតិចជាង 4 Ω។
៦.១.៥.ដើម្បីធានាបាននូវដំណើរការធម្មតារបស់ឧបករណ៍ ប្រសិនបើខ្យល់ដែលបានបង្ហាប់នៃប្រភពខ្យល់មិនអាចបំពេញតាមតម្រូវការនៃប្រភពខ្យល់នោះ វាគួរតែត្រូវបានដំឡើងនៅលើឧបករណ៍ម៉ាស៊ីន។
បន្ថែមឧបករណ៍បន្សុតប្រភពខ្យល់មួយឈុត (បន្សាបសំណើម បន្សុទ្ធ តម្រង) មុនពេលខ្យល់។
៦.១.៦.ទុកឧបករណ៍ឱ្យឆ្ងាយពីពន្លឺព្រះអាទិត្យដោយផ្ទាល់ រំញ័រ និងប្រភពកំដៅ ម៉ាស៊ីនភ្លើងប្រេកង់ខ្ពស់ ម៉ាស៊ីនផ្សារអគ្គីសនី។ល។ ដើម្បីជៀសវាងការបរាជ័យក្នុងការផលិតឧបករណ៍ម៉ាស៊ីន ឬការបាត់បង់ភាពត្រឹមត្រូវនៃឧបករណ៍ម៉ាស៊ីន។
7.ធប៉ារ៉ាម៉ែត្របច្ចេកទេស:
| គំរូ | 6025-6Z | |
| ទំហំការងារកែច្នៃ | ប្រវែង × ទទឹង × កម្ពស់ (មម) | 6000 × 2300 × 2300 |
| ចំណីអតិបរមា Gantry | ទទឹង (មម) | ៦៨០០ |
| ទំហំតុធ្វើការ | ប្រវែង X ទទឹង (មម) | 3000*1000=4 |
| ដំណើរទេសចរណ៍ | ជួរឈរផ្លាស់ទីទៅមុខ (មម) | ៧០០០ |
| ចៀមឈ្មោលពីរលើកឡើងលើចុះក្រោម | ការកើនឡើង និងចុះក្រោមនៃ ram (mm) | ២៥០០ |
| កណ្តាល spindle ទៅចម្ងាយយន្តហោះតារាង | 0-2500 ម។ | |
|
ប្រភេទក្បាលខួងផ្តេក ក្បាលថាមពលមួយពីរ
| បរិមាណ (2) | ២ |
| Spindle taper | BT50 | |
| អង្កត់ផ្ចិតខួង (មម) | Φ2-Φ60 | |
| អង្កត់ផ្ចិតការប៉ះ (ម. | M3-M30 | |
| ល្បឿន spindle (r/min) | 30-5000 | |
| ថាមពលម៉ូទ័រ servo spindle (kw) | ៣៧*២ | |
| ចម្ងាយធ្វើដំណើរឆ្វេង និងស្តាំរវាងចុង spindle ពីរ | 5800-6800 ម។ | |
| ការដាច់សរសៃឈាមខួរក្បាលខាងឆ្វេងនិងស្តាំនៃចៀមឈ្មោល (មម) | ៥០០ | |
| ភាពត្រឹមត្រូវនៃទីតាំងទ្វេទិស | ៣០០ * ៣០០ ម។ | ± 0.025 |
| ភាពត្រឹមត្រូវនៃការដាក់ទីតាំងដដែលៗទ្វេទិស | ៣០០ * ៣០០ ម។ | ± 0.02 |
| វិមាត្រឧបករណ៍ម៉ាស៊ីន | ប្រវែង × ទទឹង × កម្ពស់ (មម) | យោងតាមគំនូរ (ប្រសិនបើមានការផ្លាស់ប្តូរនៅក្នុងដំណើរការរចនាយើងនឹងជូនដំណឹងដល់អ្នក) |
| ទំងន់សរុប (t) | ៧២ ត | |